 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Failure Recovery: An Engagement-Aware Human-in-the-loop Framework for Robotic Systems
Jun 16, 2026Conventional human-in-the-loop approaches typically involve users only when a robot encounters failure or uncertainty, treating humans primarily as tools for improving robot performance. However, in many human-centered robotics settings, interaction should support engagement by keeping users involved in decision-making rather than limiting them to failure-driven interventions. This is particularly compelling in physical caregiving, where mobility limitations can reduce users' ability to intervene or modulate the robot's behavior in the moment. As a result, failure-driven interaction policies may relegate users to passive observers for long stretches of the task. For example, a user with mobility limitations may feel less engaged when being continuously and passively fed by a robot. At the same time, overly frequent interaction can be tiring and increase the user's workload. To address this trade-off, we propose Engagement-aware MPC (E-MPC), a user-engagement-aware method that plans interaction to maintain engagement while respecting a workload constraint. E-MPC leverages a user interaction dynamics model that captures how user engagement evolves as a function of both the frequency and type of interaction. Rather than requesting input only when difficulties arise during task execution, the robot proactively considers the user's preferred level of engagement throughout the task, balancing autonomy and interaction while ensuring task success. We evaluate E-MPC in simulation with several ablations and baseline comparisons. Results demonstrate the effectiveness of our approach across diverse user personas. In addition, we conduct a real-world user study with participants with emulated mobility limitations on a robot-assisted bite acquisition system, showing that E-MPC improves user experience while maintaining task success.
* Project website at https://emprise.cs.cornell.edu/empc
Impact of Different Failures on a Robot's Perceived Reliability
Mar 09, 2026Robots fail, potentially leading to a loss in the robot's perceived reliability (PR), a measure correlated with trustworthiness. In this study we examine how various kinds of failures affect the PR of the robot differently, and how this measure recovers without explicit social repair actions by the robot. In a preregistered and controlled online video study, participants were asked to predict a robot's success in a pick-and-place task. We examined manipulation failures (slips), freezing (lapses), and three types of incorrect picked objects or place goals (mistakes). Participants were shown one of 11 videos -- one of five types of failure, one of five types of failure followed by a successful execution in the same video, or a successful execution video. This was followed by two additional successful execution videos. Participants bet money either on the robot or on a coin toss after each video. People's betting patterns along with a qualitative analysis of their survey responses highlight that mistakes are less damaging to PR than slips or lapses, and some mistakes are even perceived as successes. We also see that successes immediately following a failure have the same effect on PR as successes without a preceding failure. Finally, we show that successful executions recover PR after a failure. Our findings highlight which robot failures are in higher need of repair in a human-robot interaction, and how trust could be recovered by robot successes.
OpenRoboCare: A Multimodal Multi-Task Expert Demonstration Dataset for Robot Caregiving
Nov 17, 2025We present OpenRoboCare, a multimodal dataset for robot caregiving, capturing expert occupational therapist demonstrations of Activities of Daily Living (ADLs). Caregiving tasks involve complex physical human-robot interactions, requiring precise perception under occlusions, safe physical contact, and long-horizon planning. While recent advances in robot learning from demonstrations have shown promise, there is a lack of a large-scale, diverse, and expert-driven dataset that captures real-world caregiving routines. To address this gap, we collect data from 21 occupational therapists performing 15 ADL tasks on two manikins. The dataset spans five modalities: RGB-D video, pose tracking, eye-gaze tracking, task and action annotations, and tactile sensing, providing rich multimodal insights into caregiver movement, attention, force application, and task execution strategies. We further analyze expert caregiving principles and strategies, offering insights to improve robot efficiency and task feasibility. Additionally, our evaluations demonstrate that OpenRoboCare presents challenges for state-of-the-art robot perception and human activity recognition methods, both critical for developing safe and adaptive assistive robots, highlighting the value of our contribution. See our website for additional visualizations: https://emprise.cs.cornell.edu/robo-care/.
Towards Embodiment Scaling Laws in Robot Locomotion
May 09, 2025Developing generalist agents that can operate across diverse tasks, environments, and physical embodiments is a grand challenge in robotics and artificial intelligence. In this work, we focus on the axis of embodiment and investigate embodiment scaling laws$\unicode{x2013}$the hypothesis that increasing the number of training embodiments improves generalization to unseen ones. Using robot locomotion as a test bed, we procedurally generate a dataset of $\sim$1,000 varied embodiments, spanning humanoids, quadrupeds, and hexapods, and train generalist policies capable of handling diverse observation and action spaces on random subsets. We find that increasing the number of training embodiments improves generalization to unseen ones, and scaling embodiments is more effective in enabling embodiment-level generalization than scaling data on small, fixed sets of embodiments. Notably, our best policy, trained on the full dataset, zero-shot transfers to novel embodiments in the real world, such as Unitree Go2 and H1. These results represent a step toward general embodied intelligence, with potential relevance to adaptive control for configurable robots, co-design of morphology and control, and beyond.
Open Scene Graphs for Open World Object-Goal Navigation
Jul 02, 2024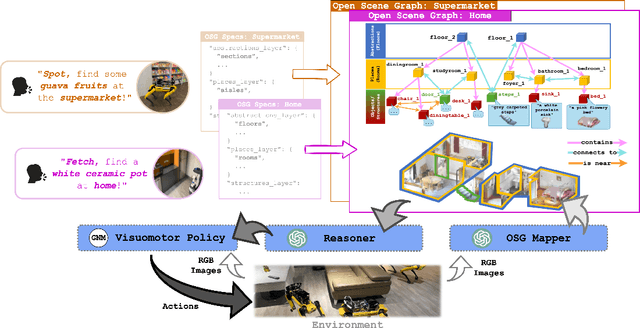
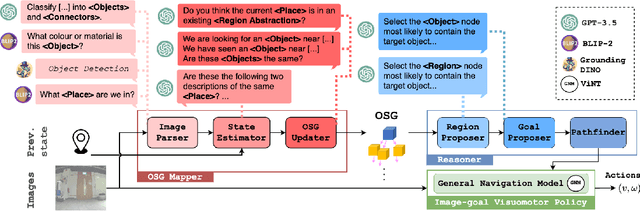
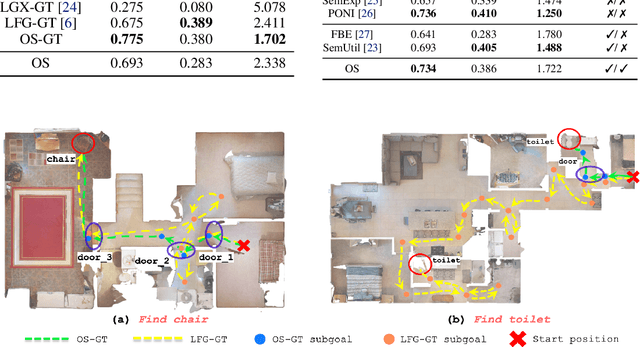

How can we build robots for open-world semantic navigation tasks, like searching for target objects in novel scenes? While foundation models have the rich knowledge and generalisation needed for these tasks, a suitable scene representation is needed to connect them into a complete robot system. We address this with Open Scene Graphs (OSGs), a topo-semantic representation that retains and organises open-set scene information for these models, and has a structure that can be configured for different environment types. We integrate foundation models and OSGs into the OpenSearch system for Open World Object-Goal Navigation, which is capable of searching for open-set objects specified in natural language, while generalising zero-shot across diverse environments and embodiments. Our OSGs enhance reasoning with Large Language Models (LLM), enabling robust object-goal navigation outperforming existing LLM approaches. Through simulation and real-world experiments, we validate OpenSearch's generalisation across varied environments, robots and novel instructions.
Invariance is Key to Generalization: Examining the Role of Representation in Sim-to-Real Transfer for Visual Navigation
Oct 23, 2023



The data-driven approach to robot control has been gathering pace rapidly, yet generalization to unseen task domains remains a critical challenge. We argue that the key to generalization is representations that are (i) rich enough to capture all task-relevant information and (ii) invariant to superfluous variability between the training and the test domains. We experimentally study such a representation -- containing both depth and semantic information -- for visual navigation and show that it enables a control policy trained entirely in simulated indoor scenes to generalize to diverse real-world environments, both indoors and outdoors. Further, we show that our representation reduces the A-distance between the training and test domains, improving the generalization error bound as a result. Our proposed approach is scalable: the learned policy improves continuously, as the foundation models that it exploits absorb more diverse data during pre-training.