 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning in Deep Networks: A Pathway to Robust Few-Shot Classification
Nov 19, 2024This study aims to optimize the few-shot image classification task and improve the model's feature extraction and classification performance by combining self-supervised learning with the deep network model ResNet-101. During the training process, we first pre-train the model with self-supervision to enable it to learn common feature expressions on a large amount of unlabeled data; then fine-tune it on the few-shot dataset Mini-ImageNet to improve the model's accuracy and generalization ability under limited data. The experimental results show that compared with traditional convolutional neural networks, ResNet-50, DenseNet, and other models, our method has achieved excellent performance of about 95.12% in classification accuracy (ACC) and F1 score, verifying the effectiveness of self-supervised learning in few-shot classification. This method provides an efficient and reliable solution for the field of few-shot image classification.
Reinforcement Learning for Adaptive Resource Scheduling in Complex System Environments
Nov 08, 2024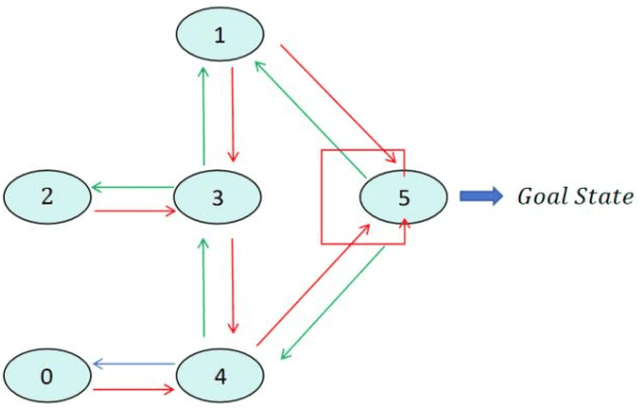
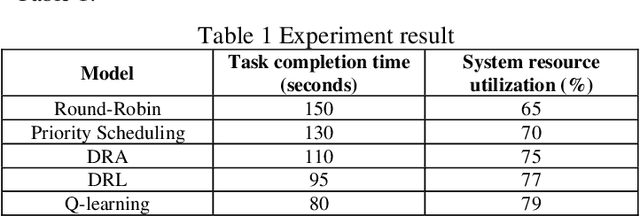
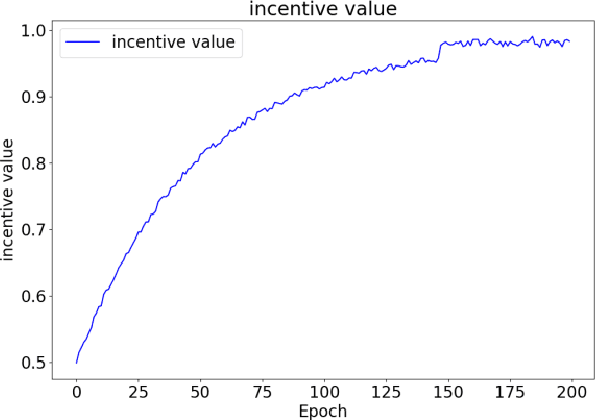

This study presents a novel computer system performance optimization and adaptive workload management scheduling algorithm based on Q-learning. In modern computing environments, characterized by increasing data volumes, task complexity, and dynamic workloads, traditional static scheduling methods such as Round-Robin and Priority Scheduling fail to meet the demands of efficient resource allocation and real-time adaptability. By contrast, Q-learning, a reinforcement learning algorithm, continuously learns from system state changes, enabling dynamic scheduling and resource optimization. Through extensive experiments, the superiority of the proposed approach is demonstrated in both task completion time and resource utilization, outperforming traditional and dynamic resource allocation (DRA) algorithms. These findings are critical as they highlight the potential of intelligent scheduling algorithms based on reinforcement learning to address the growing complexity and unpredictability of computing environments. This research provides a foundation for the integration of AI-driven adaptive scheduling in future large-scale systems, offering a scalable, intelligent solution to enhance system performance, reduce operating costs, and support sustainable energy consumption. The broad applicability of this approach makes it a promising candidate for next-generation computing frameworks, such as edge computing, cloud computing, and the Internet of Things.
Semantic Segmentation of Underwater Imagery: Dataset and Benchmark
Apr 02, 2020


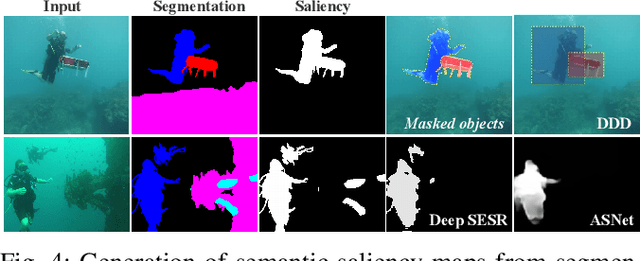
In this paper, we present the first large-scale dataset for semantic Segmentation of Underwater IMagery (SUIM). It contains over 1500 images with pixel annotations for eight object categories: fish (vertebrates), reefs (invertebrates), aquatic plants, wrecks/ruins, human divers, robots, and sea-floor. The images are rigorously collected during oceanic explorations and human-robot collaborative experiments, and annotated by human participants. We also present a comprehensive benchmark evaluation of several state-of-the-art semantic segmentation approaches based on standard performance metrics. Additionally, we present SUIM-Net, a fully-convolutional deep residual model that balances the trade-off between performance and computational efficiency. It offers competitive performance while ensuring fast end-to-end inference, which is essential for its use in the autonomy pipeline by visually-guided underwater robots. In particular, we demonstrate its usability benefits for visual servoing, saliency prediction, and detailed scene understanding. With a variety of use cases, the proposed model and benchmark dataset open up promising opportunities for future research on underwater robot vision.