 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContextual ASR Error Handling with LLMs Augmentation for Goal-Oriented Conversational AI
Jan 10, 2025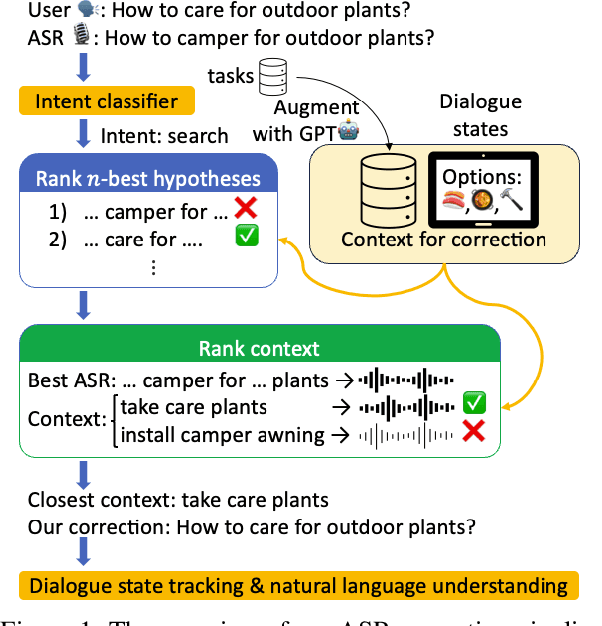
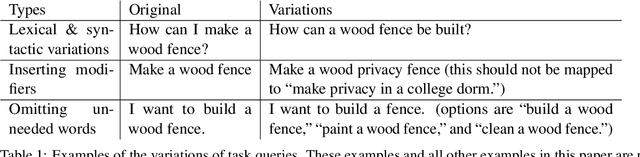


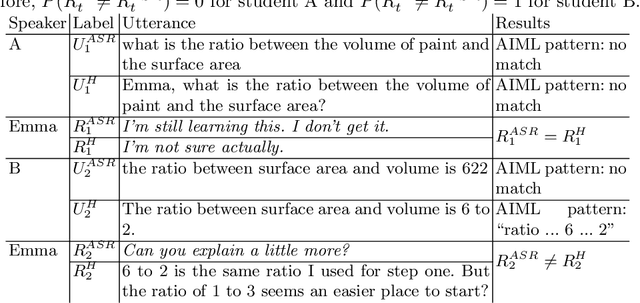
General-purpose automatic speech recognition (ASR) systems do not always perform well in goal-oriented dialogue. Existing ASR correction methods rely on prior user data or named entities. We extend correction to tasks that have no prior user data and exhibit linguistic flexibility such as lexical and syntactic variations. We propose a novel context augmentation with a large language model and a ranking strategy that incorporates contextual information from the dialogue states of a goal-oriented conversational AI and its tasks. Our method ranks (1) n-best ASR hypotheses by their lexical and semantic similarity with context and (2) context by phonetic correspondence with ASR hypotheses. Evaluated in home improvement and cooking domains with real-world users, our method improves recall and F1 of correction by 34% and 16%, respectively, while maintaining precision and false positive rate. Users rated .8-1 point (out of 5) higher when our correction method worked properly, with no decrease due to false positives.
What metrics of participation balance predict outcomes of collaborative learning with a robot?
May 17, 2024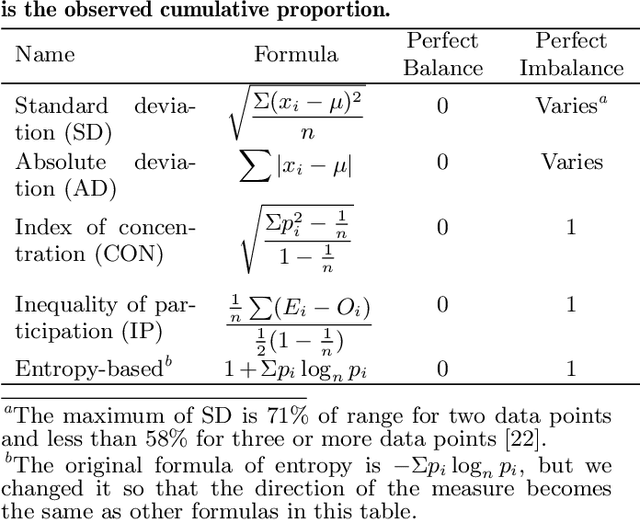
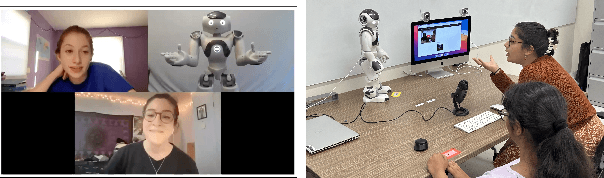
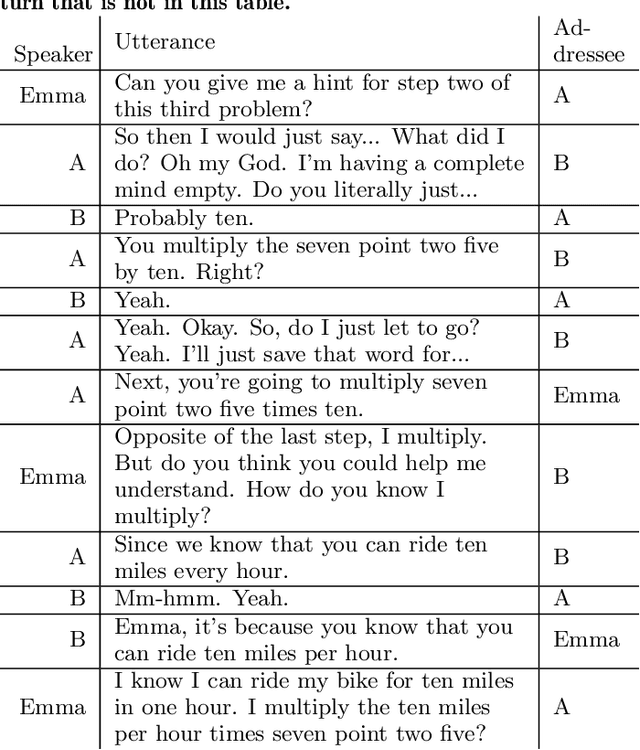
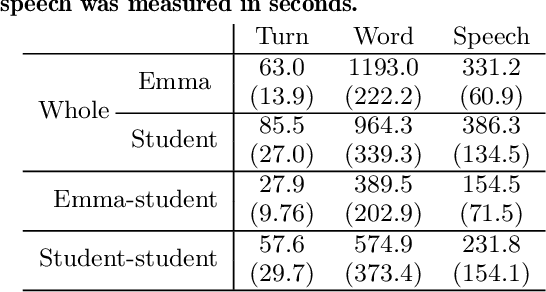
One of the keys to the success of collaborative learning is balanced participation by all learners, but this does not always happen naturally. Pedagogical robots have the potential to facilitate balance. However, it remains unclear what participation balance robots should aim at; various metrics have been proposed, but it is still an open question whether we should balance human participation in human-human interactions (HHI) or human-robot interactions (HRI) and whether we should consider robots' participation in collaborative learning involving multiple humans and a robot. This paper examines collaborative learning between a pair of students and a teachable robot that acts as a peer tutee to answer the aforementioned question. Through an exploratory study, we hypothesize which balance metrics in the literature and which portions of dialogues (including vs. excluding robots' participation and human participation in HHI vs. HRI) will better predict learning as a group. We test the hypotheses with another study and replicate them with automatically obtained units of participation to simulate the information available to robots when they adaptively fix imbalances in real-time. Finally, we discuss recommendations on which metrics learning science researchers should choose when trying to understand how to facilitate collaboration.
Impact of Experiencing Misrecognition by Teachable Agents on Learning and Rapport
Jun 11, 2023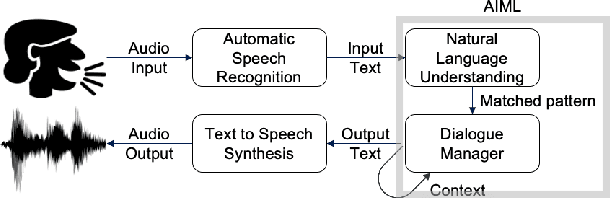
While speech-enabled teachable agents have some advantages over typing-based ones, they are vulnerable to errors stemming from misrecognition by automatic speech recognition (ASR). These errors may propagate, resulting in unexpected changes in the flow of conversation. We analyzed how such changes are linked with learning gains and learners' rapport with the agents. Our results show they are not related to learning gains or rapport, regardless of the types of responses the agents should have returned given the correct input from learners without ASR errors. We also discuss the implications for optimal error-recovery policies for teachable agents that can be drawn from these findings.
Comparison of Lexical Alignment with a Teachable Robot in Human-Robot and Human-Human-Robot Interactions
Sep 23, 2022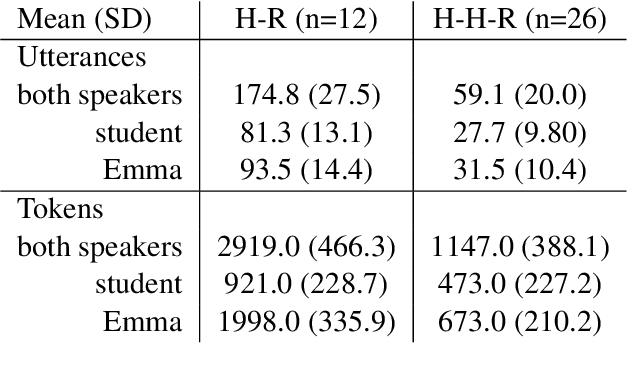
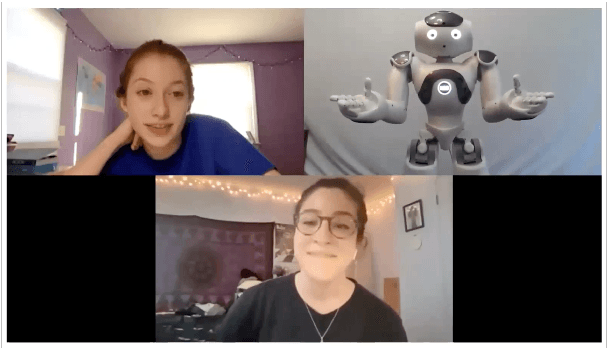
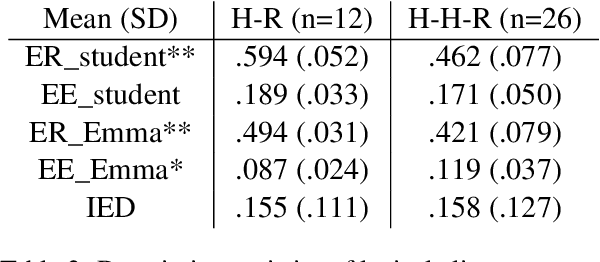
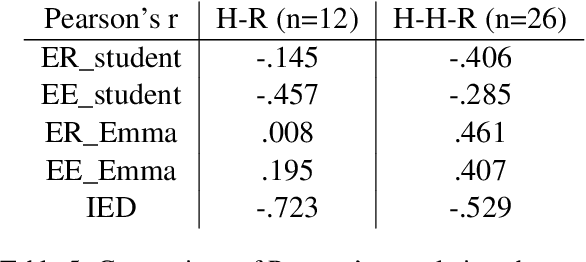
Speakers build rapport in the process of aligning conversational behaviors with each other. Rapport engendered with a teachable agent while instructing domain material has been shown to promote learning. Past work on lexical alignment in the field of education suffers from limitations in both the measures used to quantify alignment and the types of interactions in which alignment with agents has been studied. In this paper, we apply alignment measures based on a data-driven notion of shared expressions (possibly composed of multiple words) and compare alignment in one-on-one human-robot (H-R) interactions with the H-R portions of collaborative human-human-robot (H-H-R) interactions. We find that students in the H-R setting align with a teachable robot more than in the H-H-R setting and that the relationship between lexical alignment and rapport is more complex than what is predicted by previous theoretical and empirical work.