 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Experiencing Misrecognition by Teachable Agents on Learning and Rapport
Jun 11, 2023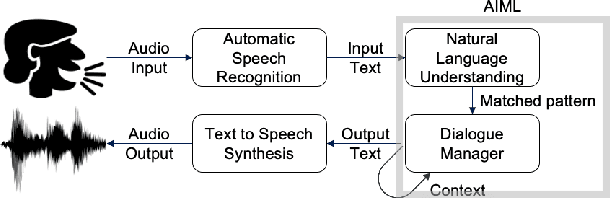
While speech-enabled teachable agents have some advantages over typing-based ones, they are vulnerable to errors stemming from misrecognition by automatic speech recognition (ASR). These errors may propagate, resulting in unexpected changes in the flow of conversation. We analyzed how such changes are linked with learning gains and learners' rapport with the agents. Our results show they are not related to learning gains or rapport, regardless of the types of responses the agents should have returned given the correct input from learners without ASR errors. We also discuss the implications for optimal error-recovery policies for teachable agents that can be drawn from these findings.
Comparison of Lexical Alignment with a Teachable Robot in Human-Robot and Human-Human-Robot Interactions
Sep 23, 2022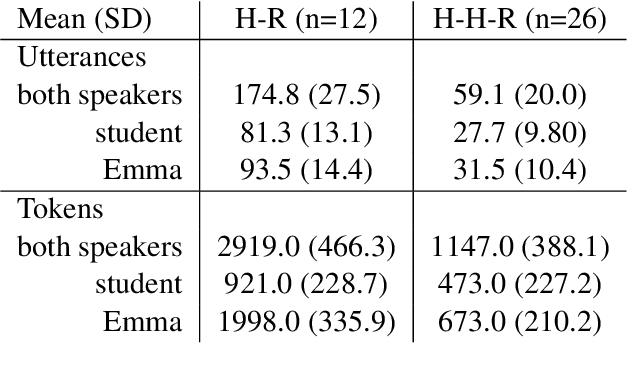
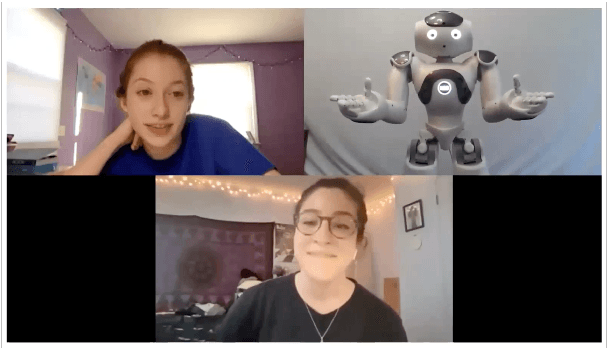
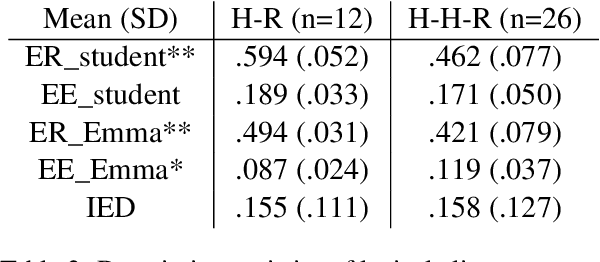
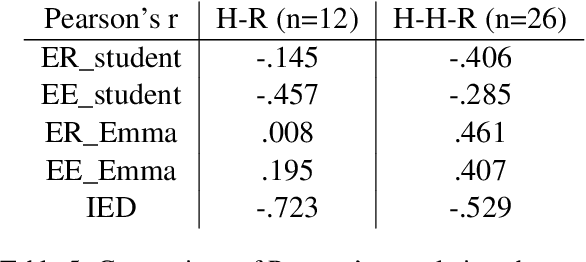
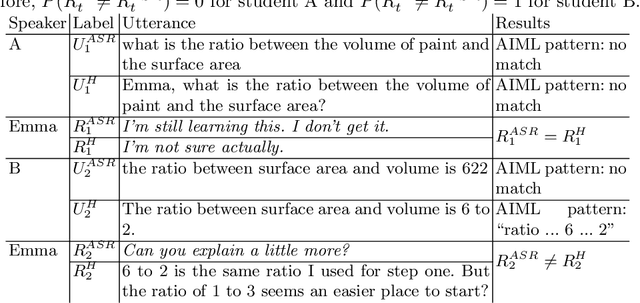
Speakers build rapport in the process of aligning conversational behaviors with each other. Rapport engendered with a teachable agent while instructing domain material has been shown to promote learning. Past work on lexical alignment in the field of education suffers from limitations in both the measures used to quantify alignment and the types of interactions in which alignment with agents has been studied. In this paper, we apply alignment measures based on a data-driven notion of shared expressions (possibly composed of multiple words) and compare alignment in one-on-one human-robot (H-R) interactions with the H-R portions of collaborative human-human-robot (H-H-R) interactions. We find that students in the H-R setting align with a teachable robot more than in the H-H-R setting and that the relationship between lexical alignment and rapport is more complex than what is predicted by previous theoretical and empirical work.