 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges and Contributing Factors in the Utilization of Large Language Models (LLMs)
Oct 20, 2023With the development of large language models (LLMs) like the GPT series, their widespread use across various application scenarios presents a myriad of challenges. This review initially explores the issue of domain specificity, where LLMs may struggle to provide precise answers to specialized questions within niche fields. The problem of knowledge forgetting arises as these LLMs might find it hard to balance old and new information. The knowledge repetition phenomenon reveals that sometimes LLMs might deliver overly mechanized responses, lacking depth and originality. Furthermore, knowledge illusion describes situations where LLMs might provide answers that seem insightful but are actually superficial, while knowledge toxicity focuses on harmful or biased information outputs. These challenges underscore problems in the training data and algorithmic design of LLMs. To address these issues, it's suggested to diversify training data, fine-tune models, enhance transparency and interpretability, and incorporate ethics and fairness training. Future technological trends might lean towards iterative methodologies, multimodal learning, model personalization and customization, and real-time learning and feedback mechanisms. In conclusion, future LLMs should prioritize fairness, transparency, and ethics, ensuring they uphold high moral and ethical standards when serving humanity.
R-Cut: Enhancing Explainability in Vision Transformers with Relationship Weighted Out and Cut
Jul 18, 2023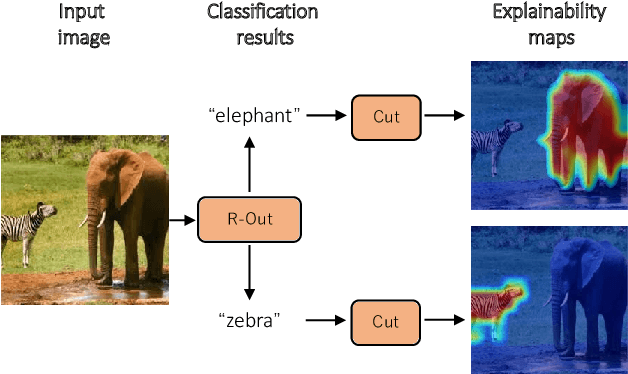
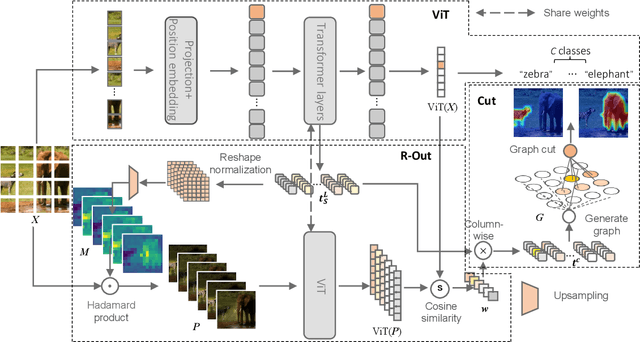


Transformer-based models have gained popularity in the field of natural language processing (NLP) and are extensively utilized in computer vision tasks and multi-modal models such as GPT4. This paper presents a novel method to enhance the explainability of Transformer-based image classification models. Our method aims to improve trust in classification results and empower users to gain a deeper understanding of the model for downstream tasks by providing visualizations of class-specific maps. We introduce two modules: the ``Relationship Weighted Out" and the ``Cut" modules. The ``Relationship Weighted Out" module focuses on extracting class-specific information from intermediate layers, enabling us to highlight relevant features. Additionally, the ``Cut" module performs fine-grained feature decomposition, taking into account factors such as position, texture, and color. By integrating these modules, we generate dense class-specific visual explainability maps. We validate our method with extensive qualitative and quantitative experiments on the ImageNet dataset. Furthermore, we conduct a large number of experiments on the LRN dataset, specifically designed for automatic driving danger alerts, to evaluate the explainability of our method in complex backgrounds. The results demonstrate a significant improvement over previous methods. Moreover, we conduct ablation experiments to validate the effectiveness of each module. Through these experiments, we are able to confirm the respective contributions of each module, thus solidifying the overall effectiveness of our proposed approach.
Autonomous Driving in Adverse Weather Conditions: A Survey
Dec 16, 2021
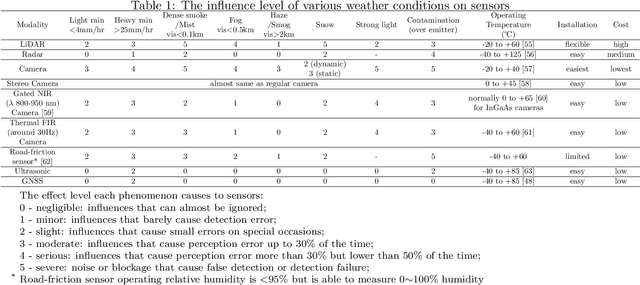


Automated Driving Systems (ADS) open up a new domain for the automotive industry and offer new possibilities for future transportation with higher efficiency and comfortable experiences. However, autonomous driving under adverse weather conditions has been the problem that keeps autonomous vehicles (AVs) from going to level 4 or higher autonomy for a long time. This paper assesses the influences and challenges that weather brings to ADS sensors in an analytic and statistical way, and surveys the solutions against inclement weather conditions. State-of-the-art techniques on perception enhancement with regard to each kind of weather are thoroughly reported. External auxiliary solutions like V2X technology, weather conditions coverage in currently available datasets, simulators, and experimental facilities with weather chambers are distinctly sorted out. By pointing out all kinds of major weather problems the autonomous driving field is currently facing, and reviewing both hardware and computer science solutions in recent years, this survey contributes a holistic overview on the obstacles and directions of ADS development in terms of adverse weather driving conditions.