 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobileWorldBench: Towards Semantic World Modeling For Mobile Agents
Dec 16, 2025World models have shown great utility in improving the task performance of embodied agents. While prior work largely focuses on pixel-space world models, these approaches face practical limitations in GUI settings, where predicting complex visual elements in future states is often difficult. In this work, we explore an alternative formulation of world modeling for GUI agents, where state transitions are described in natural language rather than predicting raw pixels. First, we introduce MobileWorldBench, a benchmark that evaluates the ability of vision-language models (VLMs) to function as world models for mobile GUI agents. Second, we release MobileWorld, a large-scale dataset consisting of 1.4M samples, that significantly improves the world modeling capabilities of VLMs. Finally, we propose a novel framework that integrates VLM world models into the planning framework of mobile agents, demonstrating that semantic world models can directly benefit mobile agents by improving task success rates. The code and dataset is available at https://github.com/jacklishufan/MobileWorld
LaViDa: A Large Diffusion Language Model for Multimodal Understanding
May 22, 2025Modern Vision-Language Models (VLMs) can solve a wide range of tasks requiring visual reasoning. In real-world scenarios, desirable properties for VLMs include fast inference and controllable generation (e.g., constraining outputs to adhere to a desired format). However, existing autoregressive (AR) VLMs like LLaVA struggle in these aspects. Discrete diffusion models (DMs) offer a promising alternative, enabling parallel decoding for faster inference and bidirectional context for controllable generation through text-infilling. While effective in language-only settings, DMs' potential for multimodal tasks is underexplored. We introduce LaViDa, a family of VLMs built on DMs. We build LaViDa by equipping DMs with a vision encoder and jointly fine-tune the combined parts for multimodal instruction following. To address challenges encountered, LaViDa incorporates novel techniques such as complementary masking for effective training, prefix KV cache for efficient inference, and timestep shifting for high-quality sampling. Experiments show that LaViDa achieves competitive or superior performance to AR VLMs on multi-modal benchmarks such as MMMU, while offering unique advantages of DMs, including flexible speed-quality tradeoff, controllability, and bidirectional reasoning. On COCO captioning, LaViDa surpasses Open-LLaVa-Next-8B by +4.1 CIDEr with 1.92x speedup. On bidirectional tasks, it achieves +59% improvement on Constrained Poem Completion. These results demonstrate LaViDa as a strong alternative to AR VLMs. Code and models will be released in the camera-ready version.
Reflect-DiT: Inference-Time Scaling for Text-to-Image Diffusion Transformers via In-Context Reflection
Mar 15, 2025The predominant approach to advancing text-to-image generation has been training-time scaling, where larger models are trained on more data using greater computational resources. While effective, this approach is computationally expensive, leading to growing interest in inference-time scaling to improve performance. Currently, inference-time scaling for text-to-image diffusion models is largely limited to best-of-N sampling, where multiple images are generated per prompt and a selection model chooses the best output. Inspired by the recent success of reasoning models like DeepSeek-R1 in the language domain, we introduce an alternative to naive best-of-N sampling by equipping text-to-image Diffusion Transformers with in-context reflection capabilities. We propose Reflect-DiT, a method that enables Diffusion Transformers to refine their generations using in-context examples of previously generated images alongside textual feedback describing necessary improvements. Instead of passively relying on random sampling and hoping for a better result in a future generation, Reflect-DiT explicitly tailors its generations to address specific aspects requiring enhancement. Experimental results demonstrate that Reflect-DiT improves performance on the GenEval benchmark (+0.19) using SANA-1.0-1.6B as a base model. Additionally, it achieves a new state-of-the-art score of 0.81 on GenEval while generating only 20 samples per prompt, surpassing the previous best score of 0.80, which was obtained using a significantly larger model (SANA-1.5-4.8B) with 2048 samples under the best-of-N approach.
OmniFlow: Any-to-Any Generation with Multi-Modal Rectified Flows
Dec 02, 2024



We introduce OmniFlow, a novel generative model designed for any-to-any generation tasks such as text-to-image, text-to-audio, and audio-to-image synthesis. OmniFlow advances the rectified flow (RF) framework used in text-to-image models to handle the joint distribution of multiple modalities. It outperforms previous any-to-any models on a wide range of tasks, such as text-to-image and text-to-audio synthesis. Our work offers three key contributions: First, we extend RF to a multi-modal setting and introduce a novel guidance mechanism, enabling users to flexibly control the alignment between different modalities in the generated outputs. Second, we propose a novel architecture that extends the text-to-image MMDiT architecture of Stable Diffusion 3 and enables audio and text generation. The extended modules can be efficiently pretrained individually and merged with the vanilla text-to-image MMDiT for fine-tuning. Lastly, we conduct a comprehensive study on the design choices of rectified flow transformers for large-scale audio and text generation, providing valuable insights into optimizing performance across diverse modalities. The Code will be available at https://github.com/jacklishufan/OmniFlows.
SegLLM: Multi-round Reasoning Segmentation
Oct 24, 2024



We present SegLLM, a novel multi-round interactive reasoning segmentation model that enhances LLM-based segmentation by exploiting conversational memory of both visual and textual outputs. By leveraging a mask-aware multimodal LLM, SegLLM re-integrates previous segmentation results into its input stream, enabling it to reason about complex user intentions and segment objects in relation to previously identified entities, including positional, interactional, and hierarchical relationships, across multiple interactions. This capability allows SegLLM to respond to visual and text queries in a chat-like manner. Evaluated on the newly curated MRSeg benchmark, SegLLM outperforms existing methods in multi-round interactive reasoning segmentation by over 20%. Additionally, we observed that training on multi-round reasoning segmentation data enhances performance on standard single-round referring segmentation and localization tasks, resulting in a 5.5% increase in cIoU for referring expression segmentation and a 4.5% improvement in Acc@0.5 for referring expression localization.
Aligning Diffusion Models by Optimizing Human Utility
Apr 06, 2024



We present Diffusion-KTO, a novel approach for aligning text-to-image diffusion models by formulating the alignment objective as the maximization of expected human utility. Since this objective applies to each generation independently, Diffusion-KTO does not require collecting costly pairwise preference data nor training a complex reward model. Instead, our objective requires simple per-image binary feedback signals, e.g. likes or dislikes, which are abundantly available. After fine-tuning using Diffusion-KTO, text-to-image diffusion models exhibit superior performance compared to existing techniques, including supervised fine-tuning and Diffusion-DPO, both in terms of human judgment and automatic evaluation metrics such as PickScore and ImageReward. Overall, Diffusion-KTO unlocks the potential of leveraging readily available per-image binary signals and broadens the applicability of aligning text-to-image diffusion models with human preferences.
World-Model-Based Control for Industrial box-packing of Multiple Objects using NewtonianVAE
Aug 04, 2023



The process of industrial box-packing, which involves the accurate placement of multiple objects, requires high-accuracy positioning and sequential actions. When a robot is tasked with placing an object at a specific location with high accuracy, it is important not only to have information about the location of the object to be placed, but also the posture of the object grasped by the robotic hand. Often, industrial box-packing requires the sequential placement of identically shaped objects into a single box. The robot's action should be determined by the same learned model. In factories, new kinds of products often appear and there is a need for a model that can easily adapt to them. Therefore, it should be easy to collect data to train the model. In this study, we designed a robotic system to automate real-world industrial tasks, employing a vision-based learning control model. We propose in-hand-view-sensitive Newtonian variational autoencoder (ihVS-NVAE), which employs an RGB camera to obtain in-hand postures of objects. We demonstrate that our model, trained for a single object-placement task, can handle sequential tasks without additional training. To evaluate efficacy of the proposed model, we employed a real robot to perform sequential industrial box-packing of multiple objects. Results showed that the proposed model achieved a 100% success rate in industrial box-packing tasks, thereby outperforming the state-of-the-art and conventional approaches, underscoring its superior effectiveness and potential in industrial tasks.
Hierarchical Open-vocabulary Universal Image Segmentation
Jul 03, 2023



Open-vocabulary image segmentation aims to partition an image into semantic regions according to arbitrary text descriptions. However, complex visual scenes can be naturally decomposed into simpler parts and abstracted at multiple levels of granularity, introducing inherent segmentation ambiguity. Unlike existing methods that typically sidestep this ambiguity and treat it as an external factor, our approach actively incorporates a hierarchical representation encompassing different semantic-levels into the learning process. We propose a decoupled text-image fusion mechanism and representation learning modules for both "things" and "stuff".1 Additionally, we systematically examine the differences that exist in the textual and visual features between these types of categories. Our resulting model, named HIPIE, tackles HIerarchical, oPen-vocabulary, and unIvErsal segmentation tasks within a unified framework. Benchmarked on over 40 datasets, e.g., ADE20K, COCO, Pascal-VOC Part, RefCOCO/RefCOCOg, ODinW and SeginW, HIPIE achieves the state-of-the-art results at various levels of image comprehension, including semantic-level (e.g., semantic segmentation), instance-level (e.g., panoptic/referring segmentation and object detection), as well as part-level (e.g., part/subpart segmentation) tasks. Our code is released at https://github.com/berkeley-hipie/HIPIE.
Refine and Represent: Region-to-Object Representation Learning
Aug 25, 2022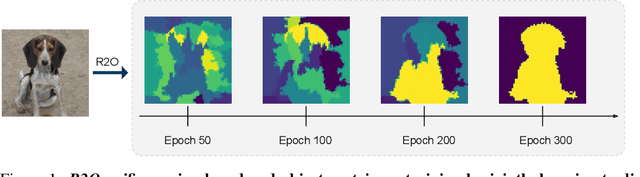
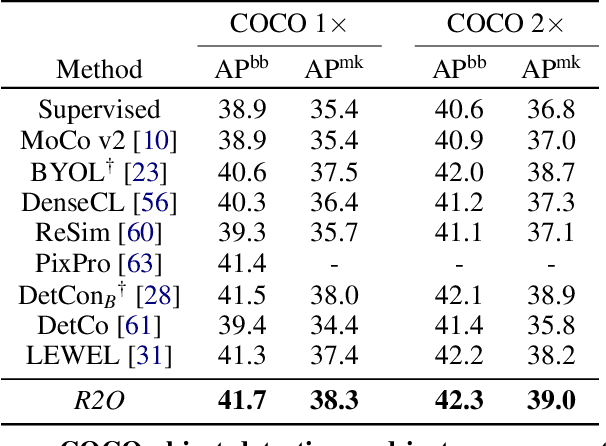
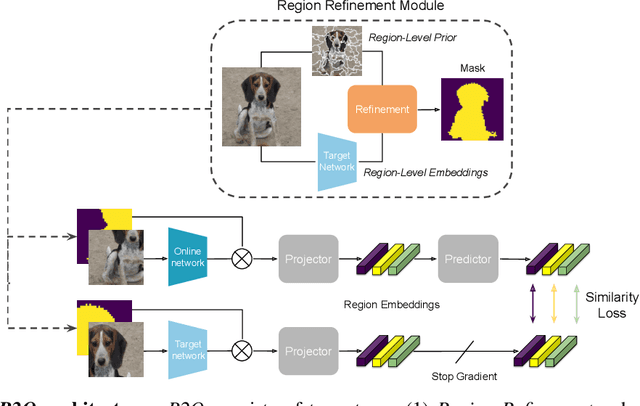
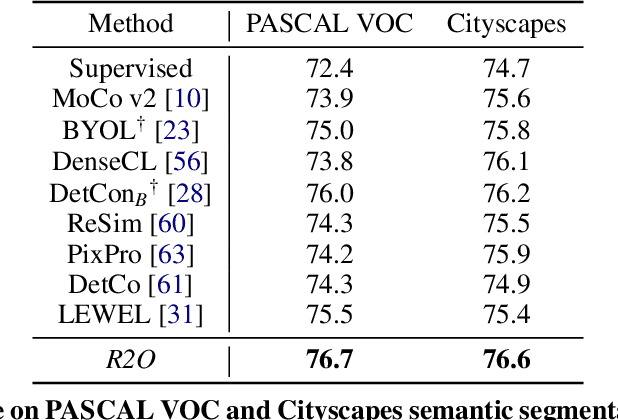
Recent works in self-supervised learning have demonstrated strong performance on scene-level dense prediction tasks by pretraining with object-centric or region-based correspondence objectives. In this paper, we present Region-to-Object Representation Learning (R2O) which unifies region-based and object-centric pretraining. R2O operates by training an encoder to dynamically refine region-based segments into object-centric masks and then jointly learns representations of the contents within the mask. R2O uses a "region refinement module" to group small image regions, generated using a region-level prior, into larger regions which tend to correspond to objects by clustering region-level features. As pretraining progresses, R2O follows a region-to-object curriculum which encourages learning region-level features early on and gradually progresses to train object-centric representations. Representations learned using R2O lead to state-of-the art performance in semantic segmentation for PASCAL VOC (+0.7 mIOU) and Cityscapes (+0.4 mIOU) and instance segmentation on MS COCO (+0.3 mask AP). Further, after pretraining on ImageNet, R2O pretrained models are able to surpass existing state-of-the-art in unsupervised object segmentation on the Caltech-UCSD Birds 200-2011 dataset (+2.9 mIoU) without any further training. We provide the code/models from this work at https://github.com/KKallidromitis/r2o.