 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Context Probing for Membership Inference in Fine-Tuned Language Models
Dec 21, 2025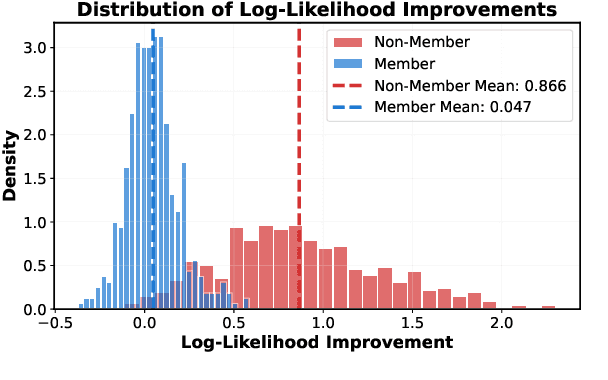
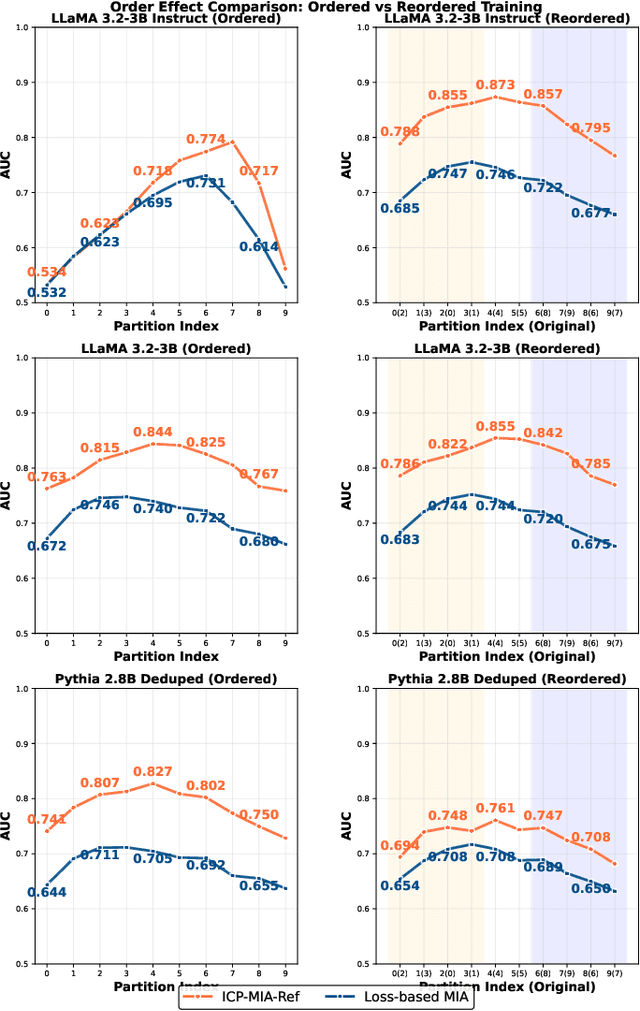
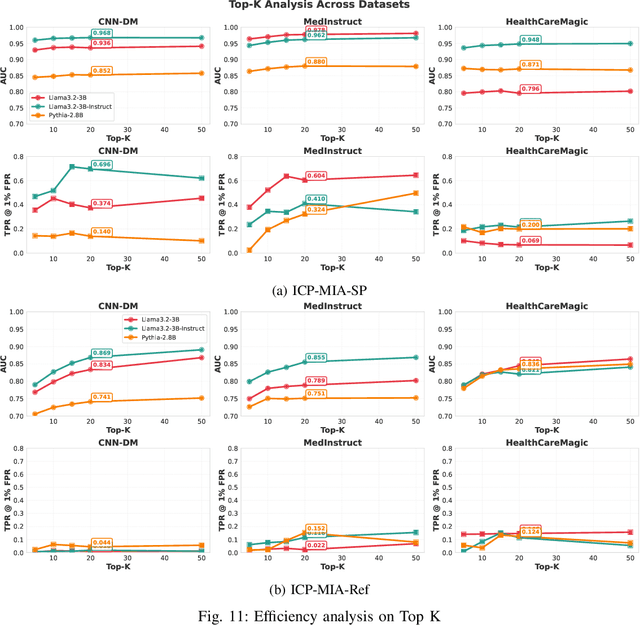
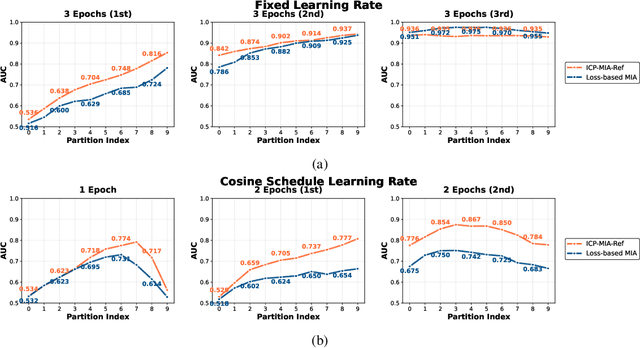
Membership inference attacks (MIAs) pose a critical privacy threat to fine-tuned large language models (LLMs), especially when models are adapted to domain-specific tasks using sensitive data. While prior black-box MIA techniques rely on confidence scores or token likelihoods, these signals are often entangled with a sample's intrinsic properties - such as content difficulty or rarity - leading to poor generalization and low signal-to-noise ratios. In this paper, we propose ICP-MIA, a novel MIA framework grounded in the theory of training dynamics, particularly the phenomenon of diminishing returns during optimization. We introduce the Optimization Gap as a fundamental signal of membership: at convergence, member samples exhibit minimal remaining loss-reduction potential, while non-members retain significant potential for further optimization. To estimate this gap in a black-box setting, we propose In-Context Probing (ICP), a training-free method that simulates fine-tuning-like behavior via strategically constructed input contexts. We propose two probing strategies: reference-data-based (using semantically similar public samples) and self-perturbation (via masking or generation). Experiments on three tasks and multiple LLMs show that ICP-MIA significantly outperforms prior black-box MIAs, particularly at low false positive rates. We further analyze how reference data alignment, model type, PEFT configurations, and training schedules affect attack effectiveness. Our findings establish ICP-MIA as a practical and theoretically grounded framework for auditing privacy risks in deployed LLMs.
On the Robustness of Graph Reduction Against GNN Backdoor
Jul 02, 2024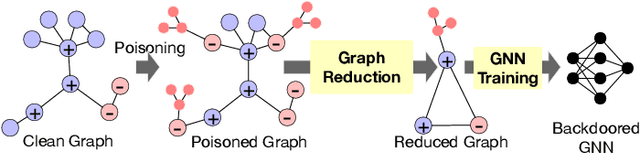


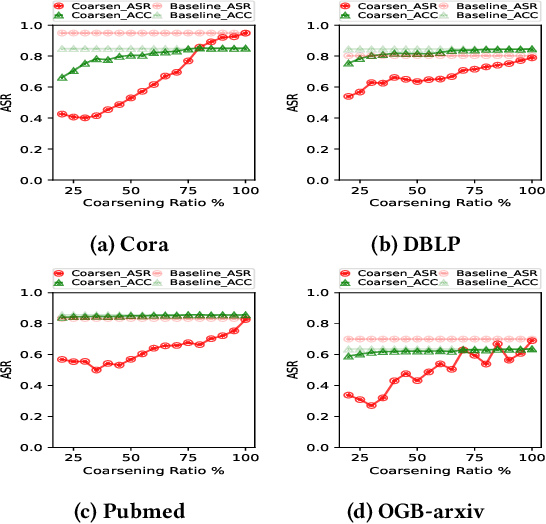
Graph Neural Networks (GNNs) are gaining popularity across various domains due to their effectiveness in learning graph-structured data. Nevertheless, they have been shown to be susceptible to backdoor poisoning attacks, which pose serious threats to real-world applications. Meanwhile, graph reduction techniques, including coarsening and sparsification, which have long been employed to improve the scalability of large graph computational tasks, have recently emerged as effective methods for accelerating GNN training on large-scale graphs. However, the current development and deployment of graph reduction techniques for large graphs overlook the potential risks of data poisoning attacks against GNNs. It is not yet clear how graph reduction interacts with existing backdoor attacks. This paper conducts a thorough examination of the robustness of graph reduction methods in scalable GNN training in the presence of state-of-the-art backdoor attacks. We performed a comprehensive robustness analysis across six coarsening methods and six sparsification methods for graph reduction, under three GNN backdoor attacks against three GNN architectures. Our findings indicate that the effectiveness of graph reduction methods in mitigating attack success rates varies significantly, with some methods even exacerbating the attacks. Through detailed analyses of triggers and poisoned nodes, we interpret our findings and enhance our understanding of how graph reduction interacts with backdoor attacks. These results highlight the critical need for incorporating robustness considerations in graph reduction for GNN training, ensuring that enhancements in computational efficiency do not compromise the security of GNN systems.
A Survey of Privacy Threats and Defense in Vertical Federated Learning: From Model Life Cycle Perspective
Feb 06, 2024Vertical Federated Learning (VFL) is a federated learning paradigm where multiple participants, who share the same set of samples but hold different features, jointly train machine learning models. Although VFL enables collaborative machine learning without sharing raw data, it is still susceptible to various privacy threats. In this paper, we conduct the first comprehensive survey of the state-of-the-art in privacy attacks and defenses in VFL. We provide taxonomies for both attacks and defenses, based on their characterizations, and discuss open challenges and future research directions. Specifically, our discussion is structured around the model's life cycle, by delving into the privacy threats encountered during different stages of machine learning and their corresponding countermeasures. This survey not only serves as a resource for the research community but also offers clear guidance and actionable insights for practitioners to safeguard data privacy throughout the model's life cycle.
DriveFuzz: Discovering Autonomous Driving Bugs through Driving Quality-Guided Fuzzing
Oct 25, 2022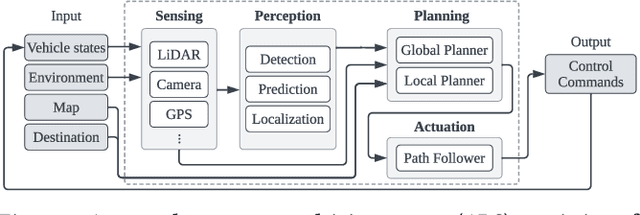
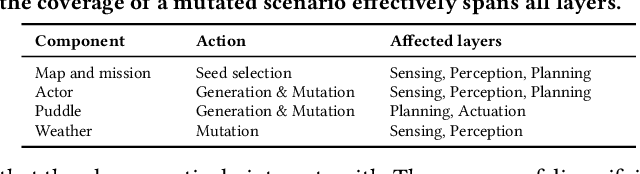

Autonomous driving has become real; semi-autonomous driving vehicles in an affordable price range are already on the streets, and major automotive vendors are actively developing full self-driving systems to deploy them in this decade. Before rolling the products out to the end-users, it is critical to test and ensure the safety of the autonomous driving systems, consisting of multiple layers intertwined in a complicated way. However, while safety-critical bugs may exist in any layer and even across layers, relatively little attention has been given to testing the entire driving system across all the layers. Prior work mainly focuses on white-box testing of individual layers and preventing attacks on each layer. In this paper, we aim at holistic testing of autonomous driving systems that have a whole stack of layers integrated in their entirety. Instead of looking into the individual layers, we focus on the vehicle states that the system continuously changes in the driving environment. This allows us to design DriveFuzz, a new systematic fuzzing framework that can uncover potential vulnerabilities regardless of their locations. DriveFuzz automatically generates and mutates driving scenarios based on diverse factors leveraging a high-fidelity driving simulator. We build novel driving test oracles based on the real-world traffic rules to detect safety-critical misbehaviors, and guide the fuzzer towards such misbehaviors through driving quality metrics referring to the physical states of the vehicle. DriveFuzz has discovered 30 new bugs in various layers of two autonomous driving systems (Autoware and CARLA Behavior Agent) and three additional bugs in the CARLA simulator. We further analyze the impact of these bugs and how an adversary may exploit them as security vulnerabilities to cause critical accidents in the real world.