 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Efficient Inference of Neural Fluid Fields via SciML Foundation Model
Dec 18, 2024



Recent developments in 3D vision have enabled successful progress in inferring neural fluid fields and realistic rendering of fluid dynamics. However, these methods require real-world flow captures, which demand dense video sequences and specialized lab setups, making the process costly and challenging. Scientific machine learning (SciML) foundation models, which are pretrained on extensive simulations of partial differential equations (PDEs), encode rich multiphysics knowledge and thus provide promising sources of domain priors for inferring fluid fields. Nevertheless, their potential to advance real-world vision problems remains largely underexplored, raising questions about the transferability and practical utility of these foundation models. In this work, we demonstrate that SciML foundation model can significantly improve the data efficiency of inferring real-world 3D fluid dynamics with improved generalization. At the core of our method is leveraging the strong forecasting capabilities and meaningful representations of SciML foundation models. We equip neural fluid fields with a novel collaborative training approach that utilizes augmented views and fluid features extracted by our foundation model. Our method demonstrates significant improvements in both quantitative metrics and visual quality, showcasing the practical applicability of SciML foundation models in real-world fluid dynamics.
Infrared Adversarial Car Stickers
May 16, 2024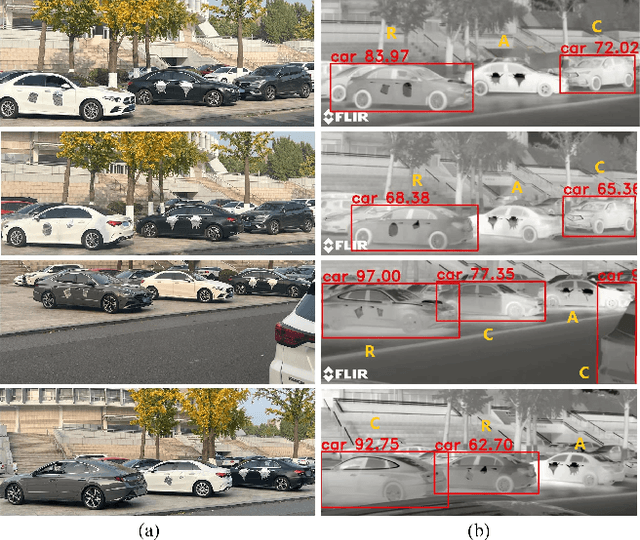
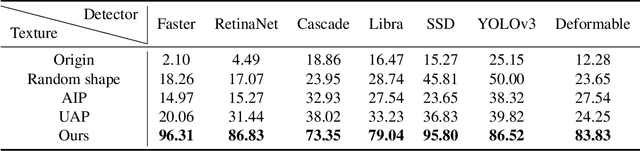
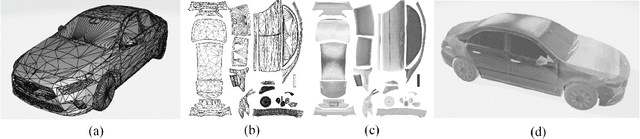
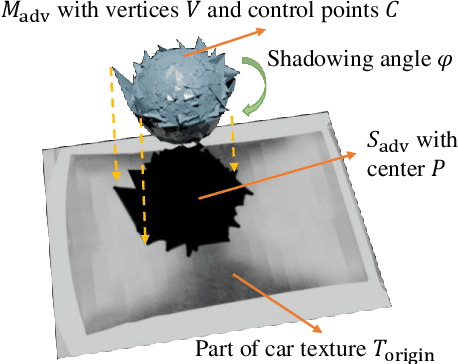
Infrared physical adversarial examples are of great significance for studying the security of infrared AI systems that are widely used in our lives such as autonomous driving. Previous infrared physical attacks mainly focused on 2D infrared pedestrian detection which may not fully manifest its destructiveness to AI systems. In this work, we propose a physical attack method against infrared detectors based on 3D modeling, which is applied to a real car. The goal is to design a set of infrared adversarial stickers to make cars invisible to infrared detectors at various viewing angles, distances, and scenes. We build a 3D infrared car model with real infrared characteristics and propose an infrared adversarial pattern generation method based on 3D mesh shadow. We propose a 3D control points-based mesh smoothing algorithm and use a set of smoothness loss functions to enhance the smoothness of adversarial meshes and facilitate the sticker implementation. Besides, We designed the aluminum stickers and conducted physical experiments on two real Mercedes-Benz A200L cars. Our adversarial stickers hid the cars from Faster RCNN, an object detector, at various viewing angles, distances, and scenes. The attack success rate (ASR) was 91.49% for real cars. In comparison, the ASRs of random stickers and no sticker were only 6.21% and 0.66%, respectively. In addition, the ASRs of the designed stickers against six unseen object detectors such as YOLOv3 and Deformable DETR were between 73.35%-95.80%, showing good transferability of the attack performance across detectors.
The Winning Solution to the iFLYTEK Challenge 2021 Cultivated Land Extraction from High-Resolution Remote Sensing Image
Feb 25, 2022
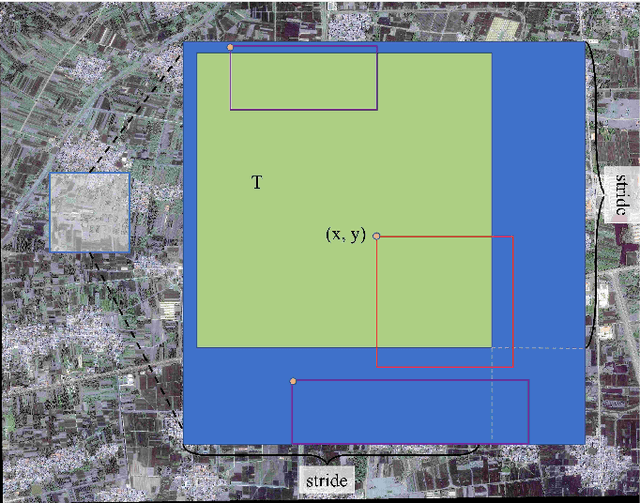
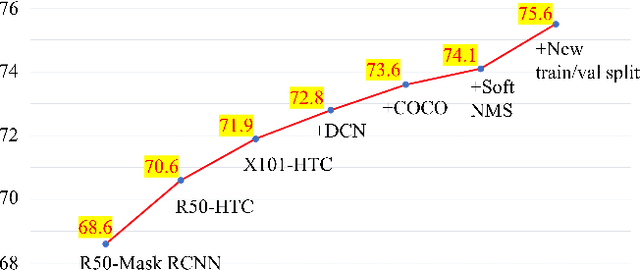

Extracting cultivated land accurately from high-resolution remote images is a basic task for precision agriculture. This report introduces our solution to the iFLYTEK challenge 2021 cultivated land extraction from high-resolution remote sensing image. The challenge requires segmenting cultivated land objects in very high-resolution multispectral remote sensing images. We established a highly effective and efficient pipeline to solve this problem. We first divided the original images into small tiles and separately performed instance segmentation on each tile. We explored several instance segmentation algorithms that work well on natural images and developed a set of effective methods that are applicable to remote sensing images. Then we merged the prediction results of all small tiles into seamless, continuous segmentation results through our proposed overlap-tile fusion strategy. We achieved the first place among 486 teams in the challenge.