 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Aware Dynamic Obstacle Avoidance in Crowded Environment with Deep Reinforcement Learning
Jun 19, 2024Mobile robots operating in crowded environments require the ability to navigate among humans and surrounding obstacles efficiently while adhering to safety standards and socially compliant mannerisms. This scale of the robot navigation problem may be classified as both a local path planning and trajectory optimization problem. This work presents an array of force sensors that act as a tactile layer to complement the use of a LiDAR for the purpose of inducing awareness of contact with any surrounding objects within immediate vicinity of a mobile robot undetected by LiDARs. By incorporating the tactile layer, the robot can take more risks in its movements and possibly go right up to an obstacle or wall, and gently squeeze past it. In addition, we built up a simulation platform via Pybullet which integrates Robot Operating System (ROS) and reinforcement learning (RL) together. A touch-aware neural network model was trained on it to create an RL-based local path planner for dynamic obstacle avoidance. Our proposed method was demonstrated successfully on an omni-directional mobile robot who was able to navigate in a crowded environment with high agility and versatility in movement, while not being overly sensitive to nearby obstacles-not-in-contact.
Real-time Digital Double Framework to Predict Collapsible Terrains for Legged Robots
Sep 20, 2022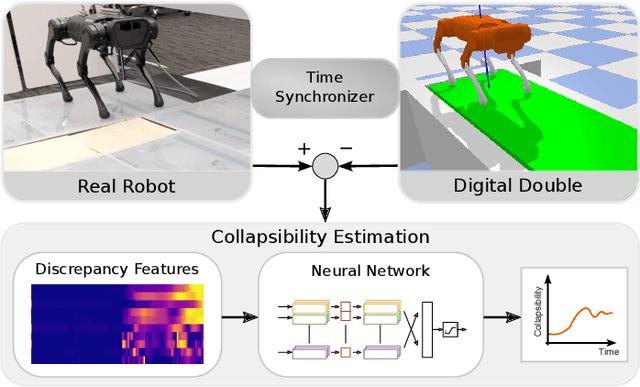
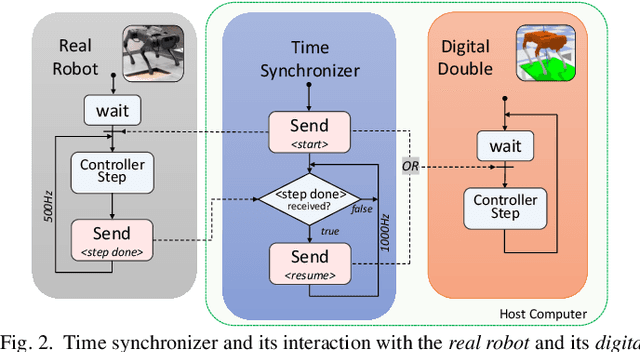
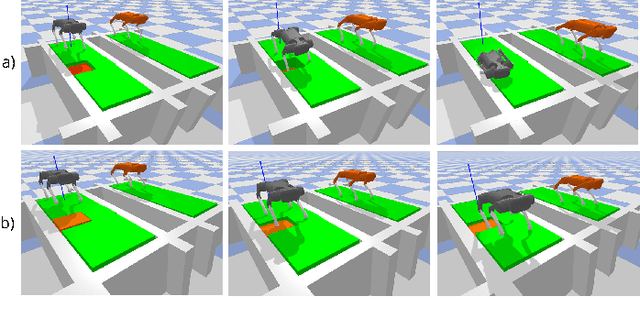
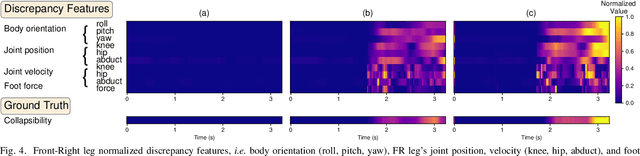
Inspired by the digital twinning systems, a novel real-time digital double framework is developed to enhance robot perception of the terrain conditions. Based on the very same physical model and motion control, this work exploits the use of such simulated digital double synchronized with a real robot to capture and extract discrepancy information between the two systems, which provides high dimensional cues in multiple physical quantities to represent differences between the modelled and the real world. Soft, non-rigid terrains cause common failures in legged locomotion, whereby visual perception solely is insufficient in estimating such physical properties of terrains. We used digital double to develop the estimation of the collapsibility, which addressed this issue through physical interactions during dynamic walking. The discrepancy in sensory measurements between the real robot and its digital double are used as input of a learning-based algorithm for terrain collapsibility analysis. Although trained only in simulation, the learned model can perform collapsibility estimation successfully in both simulation and real world. Our evaluation of results showed the generalization to different scenarios and the advantages of the digital double to reliably detect nuances in ground conditions.
A Large-scale Industrial and Professional Occupation Dataset
Apr 25, 2020
There has been growing interest in utilizing occupational data mining and analysis. In today's job market, occupational data mining and analysis is growing in importance as it enables companies to predict employee turnover, model career trajectories, screen through resumes and perform other human resource tasks. A key requirement to facilitate these tasks is the need for an occupation-related dataset. However, most research use proprietary datasets or do not make their dataset publicly available, thus impeding development in this area. To solve this issue, we present the Industrial and Professional Occupation Dataset (IPOD), which comprises 192k job titles belonging to 56k LinkedIn users. In addition to making IPOD publicly available, we also: (i) manually annotate each job title with its associated level of seniority, domain of work and location; and (ii) provide embedding for job titles and discuss various use cases. This dataset is publicly available at https://github.com/junhua/ipod.
IPOD: Corpus of 190,000 Industrial Occupations
Oct 22, 2019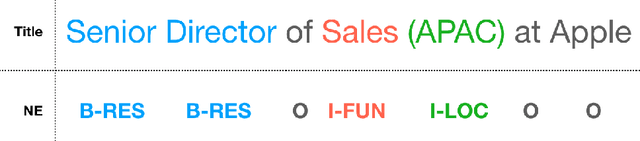
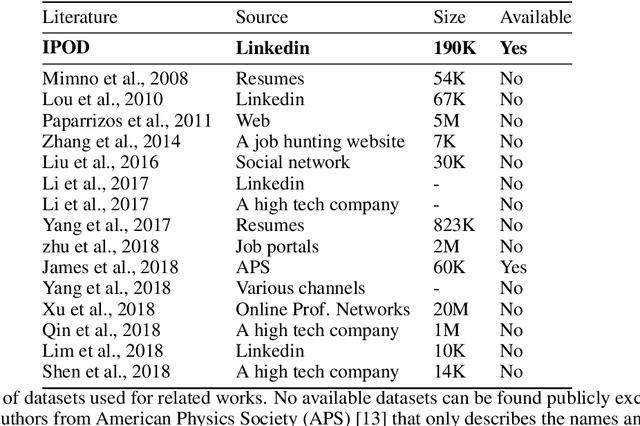
Job titles are the most fundamental building blocks for occupational data mining tasks, such as Career Modelling and Job Recommendation. However, there are no publicly available dataset to support such efforts. In this work, we present the Industrial and Professional Occupations Dataset (IPOD), which is a comprehensive corpus that consists of over 190,000 job titles crawled from over 56,000 profiles from Linkedin. To the best of our knowledge, IPOD is the first dataset released for industrial occupations mining. We use a knowledge-based approach for sequence tagging, creating a gazzetteer with domain-specific named entities tagged by 3 experts. All title NE tags are populated by the gazetteer using BIOES scheme. Finally, We develop 4 baseline models for the dataset on NER task with several models, including Linear Regression, CRF, LSTM and the state-of-the-art bi-directional LSTM-CRF. Both CRF and LSTM-CRF outperform human in both exact-match accuracy and f1 scores.