 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAR-LOAM: Color-Assisted Robust LiDAR Odometry and Mapping
Feb 24, 2025



In this letter, we propose a color-assisted robust framework for accurate LiDAR odometry and mapping (LOAM). Simultaneously receiving data from both the LiDAR and the camera, the framework utilizes the color information from the camera images to colorize the LiDAR point clouds and then performs iterative pose optimization. For each LiDAR scan, the edge and planar features are extracted and colored using the corresponding image and then matched to a global map. Specifically, we adopt a perceptually uniform color difference weighting strategy to exclude color correspondence outliers and a robust error metric based on the Welsch's function to mitigate the impact of positional correspondence outliers during the pose optimization process. As a result, the system achieves accurate localization and reconstructs dense, accurate, colored and three-dimensional (3D) maps of the environment. Thorough experiments with challenging scenarios, including complex forests and a campus, show that our method provides higher robustness and accuracy compared with current state-of-the-art methods.
A Hybrid-Domain Framework for Secure Gradient Tree Boosting
May 18, 2020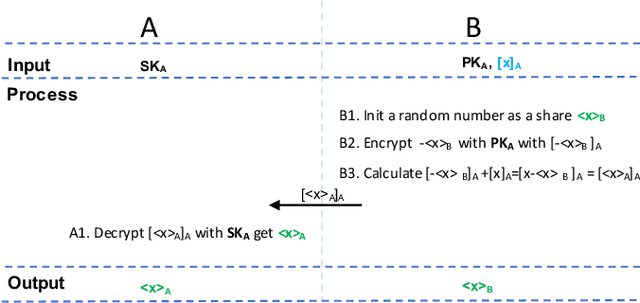
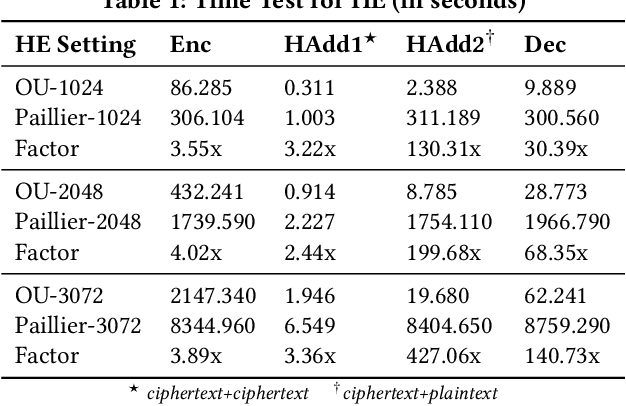
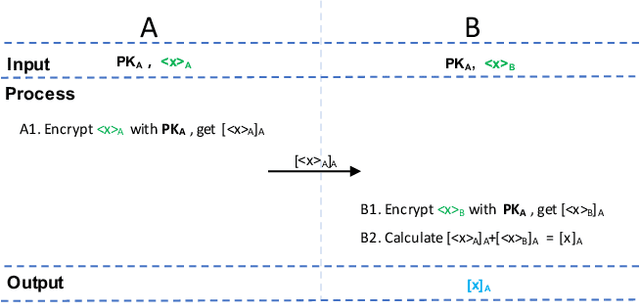
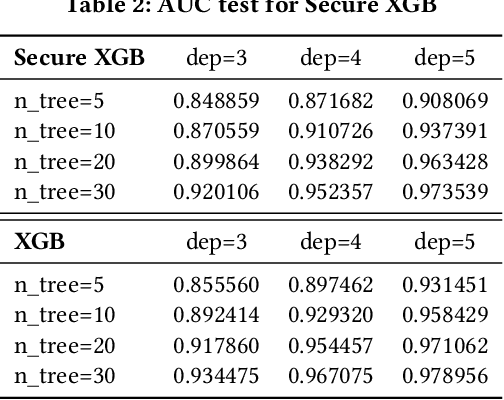
Gradient tree boosting (e.g. XGB) is one of the most widely usedmachine learning models in practice. How to build a secure XGB inface of data isolation problem becomes a hot research topic. However, existing works tend to leak intermediate information and thusraise potential privacy risk. In this paper, we propose a novel framework for two parties to build secure XGB with vertically partitioneddata. Specifically, we associate Homomorphic Encryption (HE) domain with Secret Sharing (SS) domain by providing the two-waytransformation primitives. The framework generally promotes theefficiency for privacy preserving machine learning and offers theflexibility to implement other machine learning models. Then weelaborate two secure XGB training algorithms as well as a corresponding prediction algorithm under the hybrid security domains.Next, we compare our proposed two training algorithms throughboth complexity analysis and experiments. Finally, we verify themodel performance on benchmark dataset and further apply ourwork to a real-world scenario.