 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Uncalibrated Visual Servoing Controller Baesd on Model-Free Adaptive Control Method with Neural Network
Nov 21, 2022



Nowadays, with the continuous expansion of application scenarios of robotic arms, there are more and more scenarios where nonspecialist come into contact with robotic arms. However, in terms of robotic arm visual servoing, traditional Position-based Visual Servoing (PBVS) requires a lot of calibration work, which is challenging for the nonspecialist to cope with. To cope with this situation, Uncalibrated Image-Based Visual Servoing (UIBVS) frees people from tedious calibration work. This work applied a model-free adaptive control (MFAC) method which means that the parameters of controller are updated in real time, bringing better ability of suppression changes of system and environment. An artificial intelligent neural network is applied in designs of controller and estimator for hand-eye relationship. The neural network is updated with the knowledge of the system input and output information in MFAC method. Inspired by "predictive model" and "receding-horizon" in Model Predictive Control (MPC) method and introducing similar structures into our algorithm, we realizes the uncalibrated visual servoing for both stationary targets and moving trajectories. Simulated experiments with a robotic manipulator will be carried out to validate the proposed algorithm.
Adaptive Finite-Time Model Estimation and Control for Manipulator Visual Servoing using Sliding Mode Control and Neural Networks
Nov 21, 2022The image-based visual servoing without models of system is challenging since it is hard to fetch an accurate estimation of hand-eye relationship via merely visual measurement. Whereas, the accuracy of estimated hand-eye relationship expressed in local linear format with Jacobian matrix is important to whole system's performance. In this article, we proposed a finite-time controller as well as a Jacobian matrix estimator in a combination of online and offline way. The local linear formulation is formulated first. Then, we use a combination of online and offline method to boost the estimation of the highly coupled and nonlinear hand-eye relationship with data collected via depth camera. A neural network (NN) is pre-trained to give a relative reasonable initial estimation of Jacobian matrix. Then, an online updating method is carried out to modify the offline trained NN for a more accurate estimation. Moreover, sliding mode control algorithm is introduced to realize a finite-time controller. Compared with previous methods, our algorithm possesses better convergence speed. The proposed estimator possesses excellent performance in the accuracy of initial estimation and powerful tracking capabilities for time-varying estimation for Jacobian matrix compared with other data-driven estimators. The proposed scheme acquires the combination of neural network and finite-time control effect which drives a faster convergence speed compared with the exponentially converge ones. Another main feature of our algorithm is that the state signals in system is proved to be semi-global practical finite-time stable. Several experiments are carried out to validate proposed algorithm's performance.
Contour Moments Based Manipulation of Composite Rigid-Deformable Objects with Finite Time Model Estimation and Shape/Position Control
Jun 04, 2021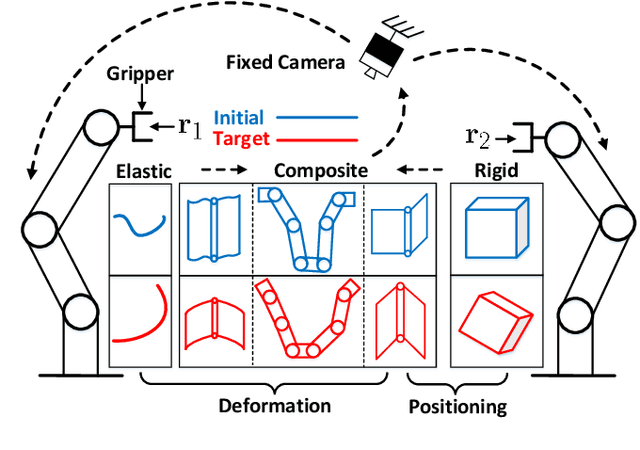
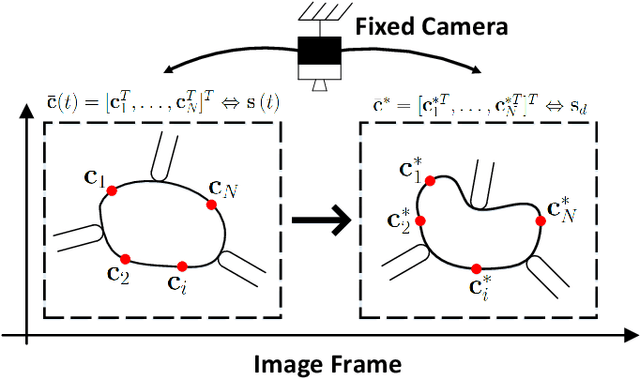
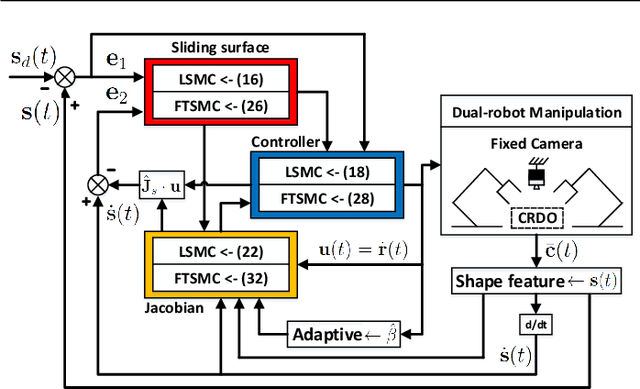
The robotic manipulation of composite rigid-deformable objects (i.e. those with mixed non-homogeneous stiffness properties) is a challenging problem with clear practical applications that, despite the recent progress in the field, it has not been sufficiently studied in the literature. To deal with this issue, in this paper we propose a new visual servoing method that has the capability to manipulate this broad class of objects (which varies from soft to rigid) with the same adaptive strategy. To quantify the object's infinite-dimensional configuration, our new approach computes a compact feedback vector of 2D contour moments features. A sliding mode control scheme is then designed to simultaneously ensure the finite-time convergence of both the feedback shape error and the model estimation error. The stability of the proposed framework (including the boundedness of all the signals) is rigorously proved with Lyapunov theory. Detailed simulations and experiments are presented to validate the effectiveness of the proposed approach. To the best of the author's knowledge, this is the first time that contour moments along with finite-time control have been used to solve this difficult manipulation problem.
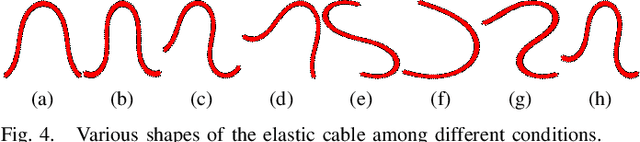
Towards Latent Space Based Manipulation of Elastic Rods using Autoencoder Models and Robust Centerline Extractions
Feb 09, 2021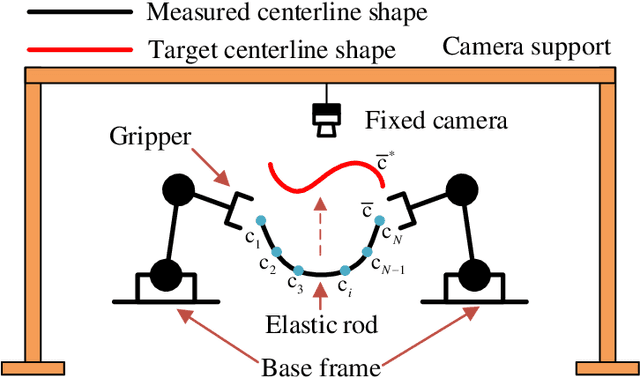
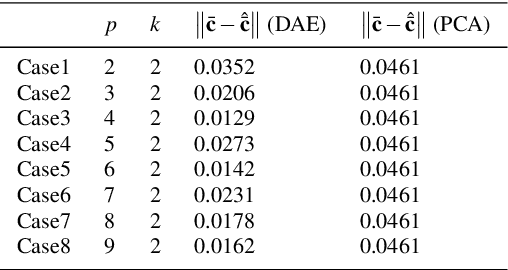
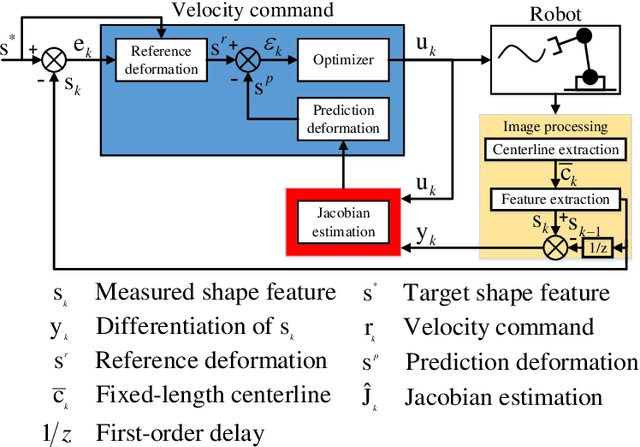
The automatic shape control of deformable objects is a challenging (and currently hot) manipulation problem due to their high-dimensional geometric features and complex physical properties. In this study, a new methodology to manipulate elastic rods automatically into 2D desired shapes is presented. An efficient vision-based controller that uses a deep autoencoder network is designed to compute a compact representation of the object's infinite-dimensional shape. An online algorithm that approximates the sensorimotor mapping between the robot's configuration and the object's shape features is used to deal with the latter's (typically unknown) mechanical properties. The proposed approach computes the rod's centerline from raw visual data in real-time by introducing an adaptive algorithm on the basis of a self-organizing network. Its effectiveness is thoroughly validated with simulations and experiments.