 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Uncalibrated Visual Servoing Controller Baesd on Model-Free Adaptive Control Method with Neural Network
Nov 21, 2022



Nowadays, with the continuous expansion of application scenarios of robotic arms, there are more and more scenarios where nonspecialist come into contact with robotic arms. However, in terms of robotic arm visual servoing, traditional Position-based Visual Servoing (PBVS) requires a lot of calibration work, which is challenging for the nonspecialist to cope with. To cope with this situation, Uncalibrated Image-Based Visual Servoing (UIBVS) frees people from tedious calibration work. This work applied a model-free adaptive control (MFAC) method which means that the parameters of controller are updated in real time, bringing better ability of suppression changes of system and environment. An artificial intelligent neural network is applied in designs of controller and estimator for hand-eye relationship. The neural network is updated with the knowledge of the system input and output information in MFAC method. Inspired by "predictive model" and "receding-horizon" in Model Predictive Control (MPC) method and introducing similar structures into our algorithm, we realizes the uncalibrated visual servoing for both stationary targets and moving trajectories. Simulated experiments with a robotic manipulator will be carried out to validate the proposed algorithm.
Adaptive Finite-Time Model Estimation and Control for Manipulator Visual Servoing using Sliding Mode Control and Neural Networks
Nov 21, 2022The image-based visual servoing without models of system is challenging since it is hard to fetch an accurate estimation of hand-eye relationship via merely visual measurement. Whereas, the accuracy of estimated hand-eye relationship expressed in local linear format with Jacobian matrix is important to whole system's performance. In this article, we proposed a finite-time controller as well as a Jacobian matrix estimator in a combination of online and offline way. The local linear formulation is formulated first. Then, we use a combination of online and offline method to boost the estimation of the highly coupled and nonlinear hand-eye relationship with data collected via depth camera. A neural network (NN) is pre-trained to give a relative reasonable initial estimation of Jacobian matrix. Then, an online updating method is carried out to modify the offline trained NN for a more accurate estimation. Moreover, sliding mode control algorithm is introduced to realize a finite-time controller. Compared with previous methods, our algorithm possesses better convergence speed. The proposed estimator possesses excellent performance in the accuracy of initial estimation and powerful tracking capabilities for time-varying estimation for Jacobian matrix compared with other data-driven estimators. The proposed scheme acquires the combination of neural network and finite-time control effect which drives a faster convergence speed compared with the exponentially converge ones. Another main feature of our algorithm is that the state signals in system is proved to be semi-global practical finite-time stable. Several experiments are carried out to validate proposed algorithm's performance.
Tongue image constitution recognition based on Complexity Perception method
Mar 01, 2018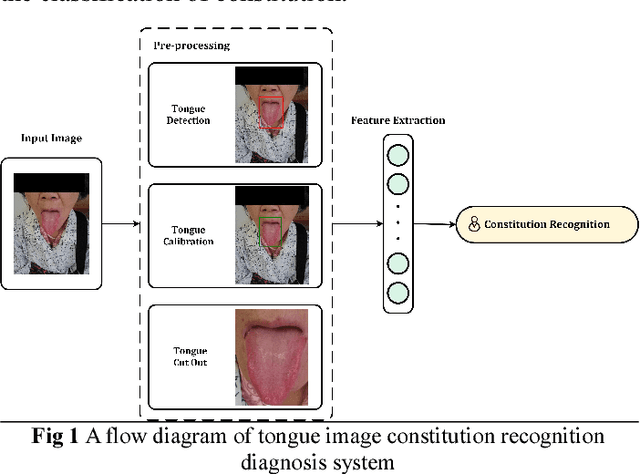
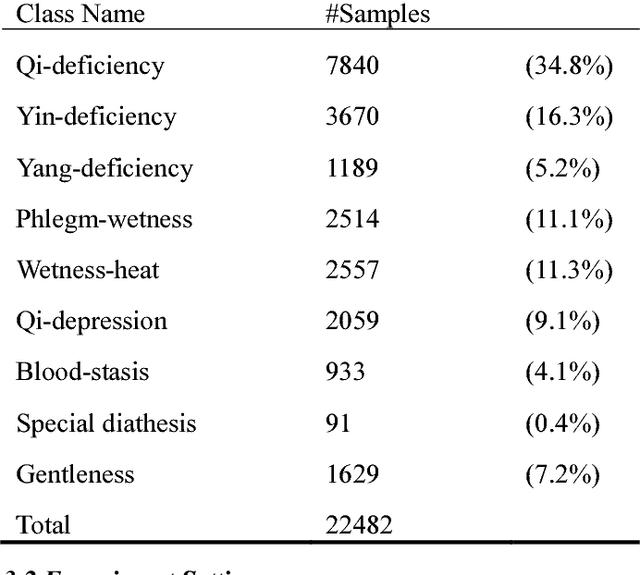
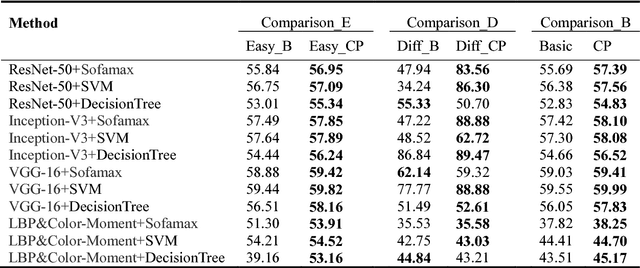
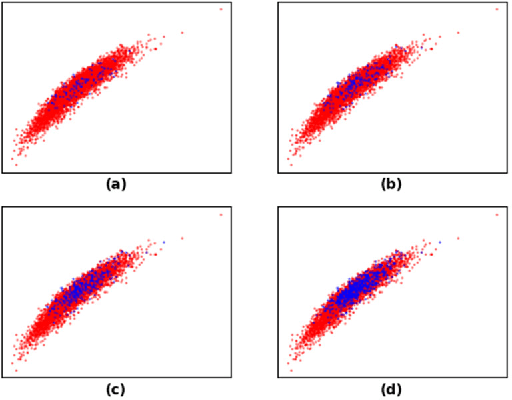
Background and Object: In China, body constitution is highly related to physiological and pathological functions of human body and determines the tendency of the disease, which is of great importance for treatment in clinical medicine. Tongue diagnosis, as a key part of Traditional Chinese Medicine inspection, is an important way to recognize the type of constitution.In order to deploy tongue image constitution recognition system on non-invasive mobile device to achieve fast, efficient and accurate constitution recognition, an efficient method is required to deal with the challenge of this kind of complex environment. Methods: In this work, we perform the tongue area detection, tongue area calibration and constitution classification using methods which are based on deep convolutional neural network. Subject to the variation of inconstant environmental condition, the distribution of the picture is uneven, which has a bad effect on classification performance. To solve this problem, we propose a method based on the complexity of individual instances to divide dataset into two subsets and classify them separately, which is capable of improving classification accuracy. To evaluate the performance of our proposed method, we conduct experiments on three sizes of tongue datasets, in which deep convolutional neural network method and traditional digital image analysis method are respectively applied to extract features for tongue images. The proposed method is combined with the base classifier Softmax, SVM, and DecisionTree respectively. Results: As the experiments results shown, our proposed method improves the classification accuracy by 1.135% on average and achieves 59.99% constitution classification accuracy. Conclusions: Experimental results on three datasets show that our proposed method can effectively improve the classification accuracy of tongue constitution recognition.