 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Spatial Allocation Protocol for Trajectory Planning of Heterogeneous Multi-Agent Systems
Oct 02, 2023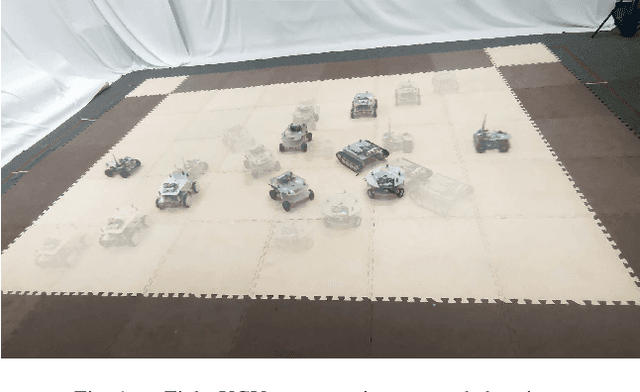
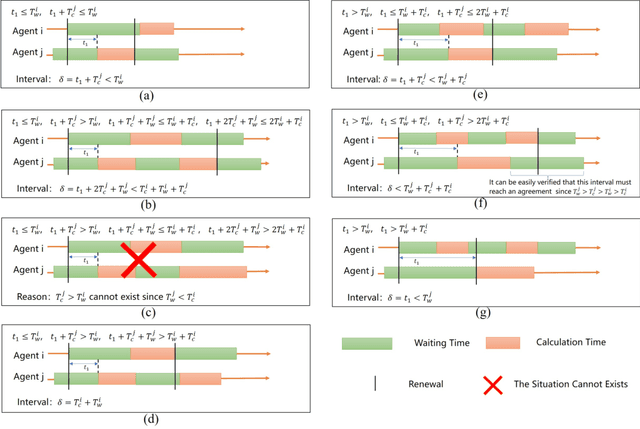
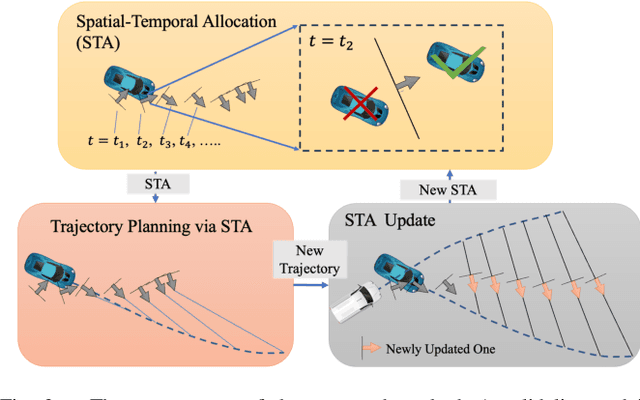
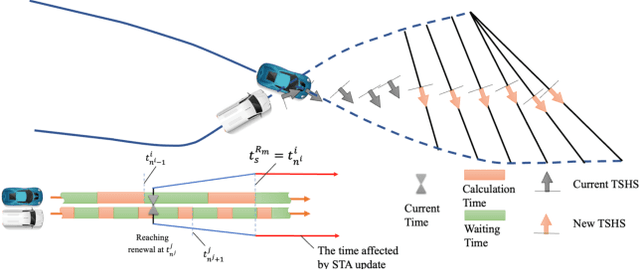
To plan the trajectories of a large and heterogeneous swarm, sequential or synchronous distributed methods usually become intractable, due to the lack of global connectivity and clock synchronization, Moreover, the existing asynchronously distributed schemes usually require recheck-like mechanisms instead of inherently considering the other' moving tendency. To this end, we propose a novel asynchronous protocol to allocate the agents' derivable space in a distributed way, by which each agent can replan trajectory depending on its own timetable. Properties such as collision avoidance and recursive feasibility are theoretically shown and a lower bound of protocol updating is provided. Comprehensive simulations and comparisons with five state-of-the-art methods validate the effectiveness of our method and illustrate the improvement in both the completion time and the moving distance. Finally, hardware experiments are carried out, where 8 heterogeneous unmanned ground vehicles with onboard computation navigate in cluttered scenarios at a high agility.
Multi-UAV Deployment in Obstacle-Cluttered Environments with LOS Connectivity
Aug 23, 2023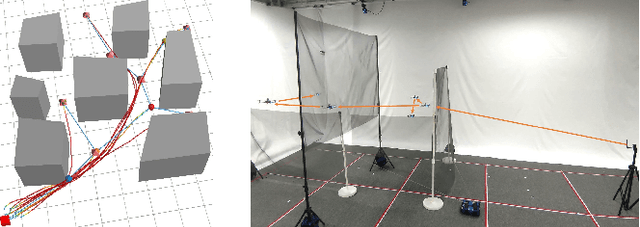
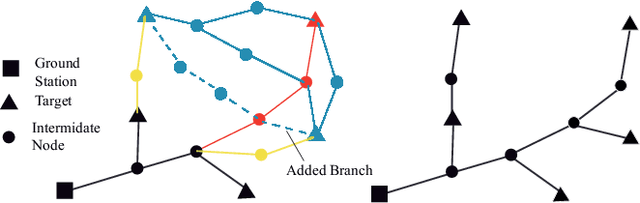
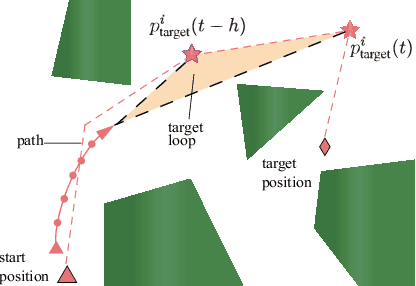
A reliable communication network is essential for multiple UAVs operating within obstacle-cluttered environments, where limited communication due to obstructions often occurs. A common solution is to deploy intermediate UAVs to relay information via a multi-hop network, which introduces two challenges: (i) how to design the structure of multi-hop networks; and (ii) how to maintain connectivity during collaborative motion. To this end, this work first proposes an efficient constrained search method based on the minimum-edge RRT$^\star$ algorithm, to find a spanning-tree topology that requires a less number of UAVs for the deployment task. To achieve this deployment, a distributed model predictive control strategy is proposed for the online motion coordination. It explicitly incorporates not only the inter-UAV and UAV-obstacle distance constraints, but also the line-of-sight (LOS) connectivity constraint. These constraints are well-known to be nonlinear and often tackled by various approximations. In contrast, this work provides a theoretical guarantee that all agent trajectories are ensured to be collision-free with a team-wise LOS connectivity at all time. Numerous simulations are performed in 3D valley-like environments, while hardware experiments validate its dynamic adaptation when the deployment position changes online.
Multi-Robot Trajectory Planning with Feasibility Guarantee and Deadlock Resolution: An Obstacle-Dense Environment
Oct 09, 2022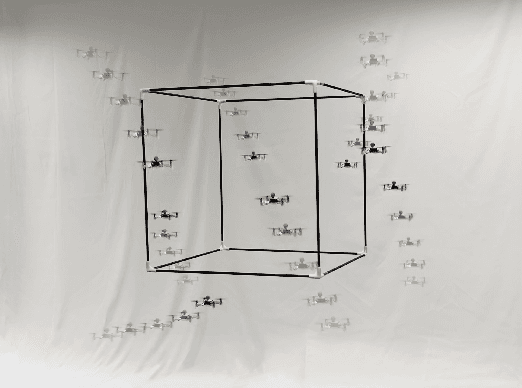

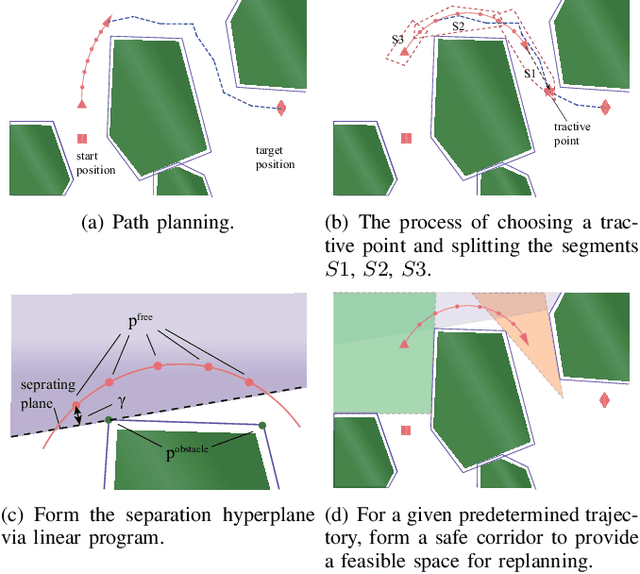

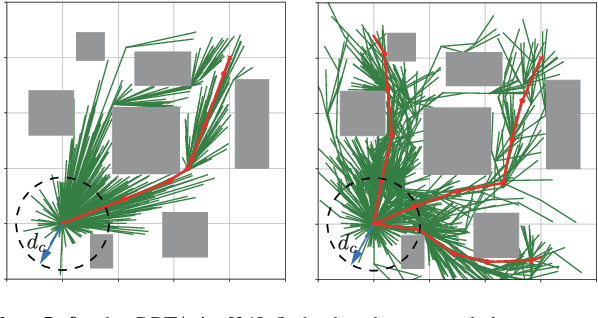
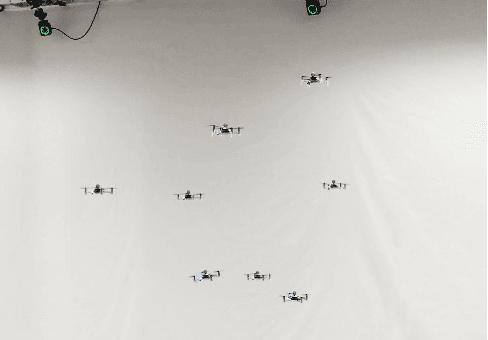
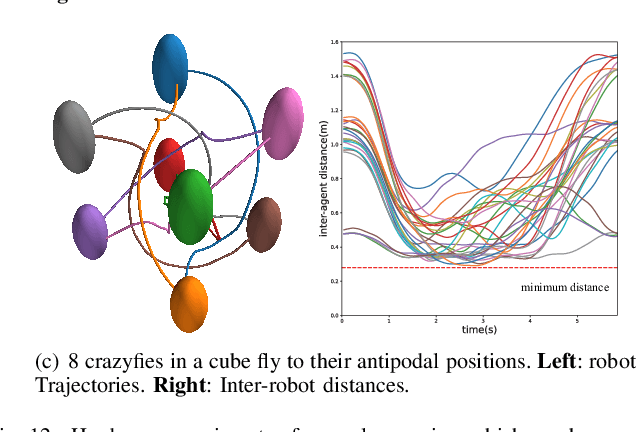
This article presents a multi-robot trajectory planning method which guarantees optimization feasibility and resolves deadlocks in an obstacle-dense environment. The method is proposed via formulating an optimization problem, where the modified buffered Voronoi cell with warning band is utilized to avoid the inter-robot collision and the deadlock is resolved by an adaptive right-hand rule. Meanwhile, a novel safe corridor derived from historical planned trajectory is proposed to provide a proper space for obstacle avoidance in trajectory planning. Comparisons with state-of-the-art works are conducted to illustrate the safety and deadlock resolution in cluttered scenarios. Additionally, hardware experiments are carried out to verify the performance of the proposed method where eight nano-quadrotors fly through a 0.6m cubic framework.
Recursive Feasibility and Deadlock Resolution in MPC-based Multi-robot Trajectory Generation
Feb 12, 2022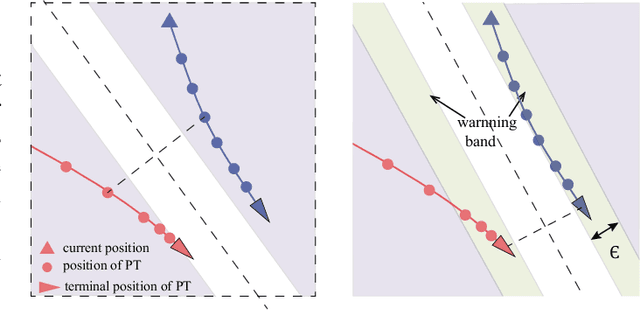
Collision-free trajectory generation within a shared workspace is fundamental for most multi-robot applications. However, despite of their versatility, many widely-used methods based on model predictive control (MPC) lack theoretical guarantees on the feasibility of underlying optimization. Furthermore, when applied in a distributed manner, deadlocks often occur where several robots block each other indefinitely without resolution. Towards this end, we propose a systematic method called infinite-horizon model predictive control with deadlock resolution (IMPC-DR). It can provably ensure recursive feasibility and effectively resolve deadlocks online in addition to the handling of input and model constraints. The method is based on formulating a convex optimization over the proposed modified buffered Voronoi cells in each planning horizon. Moreover, it is fully distributed and requires only local inter-robot communication. Comprehensive simulation and experiment studies are conducted over large-scale multi-robot systems. Significant improvements of both feasibility and success rate are shown, in comparison with other state-of-the-art methods and especially in crowded and high-speed scenarios.
A*3D Dataset: Towards Autonomous Driving in Challenging Environments
Sep 17, 2019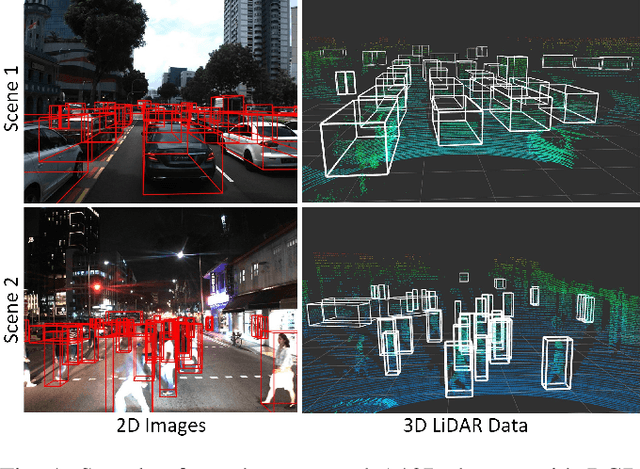
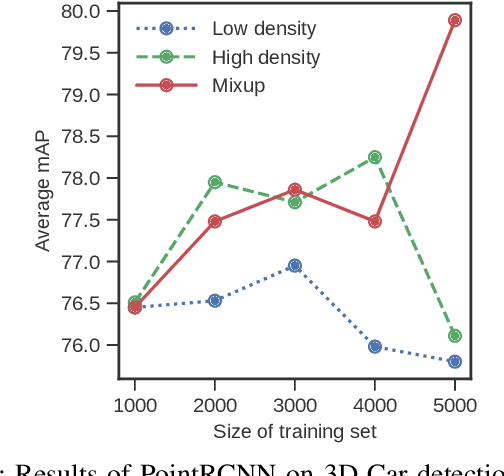
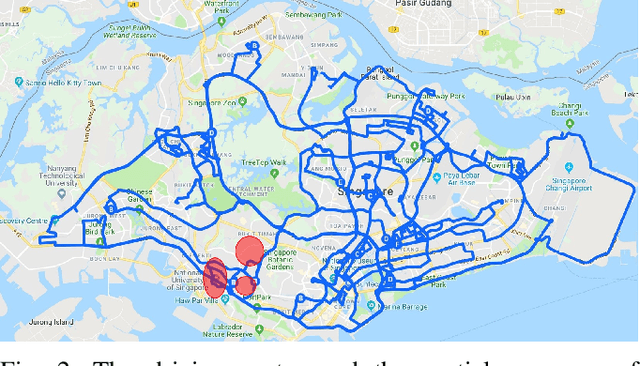
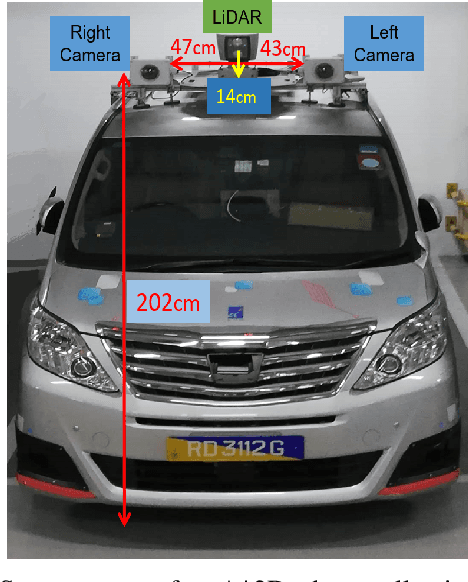
With the increasing global popularity of self-driving cars, there is an immediate need for challenging real-world datasets for benchmarking and training various computer vision tasks such as 3D object detection. Existing datasets either represent simple scenarios or provide only day-time data. In this paper, we introduce a new challenging A*3D dataset which consists of RGB images and LiDAR data with significant diversity of scene, time, and weather. The dataset consists of high-density images ($\approx~10$ times more than the pioneering KITTI dataset), heavy occlusions, a large number of night-time frames ($\approx~3$ times the nuScenes dataset), addressing the gaps in the existing datasets to push the boundaries of tasks in autonomous driving research to more challenging highly diverse environments. The dataset contains $39\text{K}$ frames, $7$ classes, and $230\text{K}$ 3D object annotations. An extensive 3D object detection benchmark evaluation on the A*3D dataset for various attributes such as high density, day-time/night-time, gives interesting insights into the advantages and limitations of training and testing 3D object detection in real-world setting.