 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Trajectory Planning with Feasibility Guarantee and Deadlock Resolution: An Obstacle-Dense Environment
Paper and Code
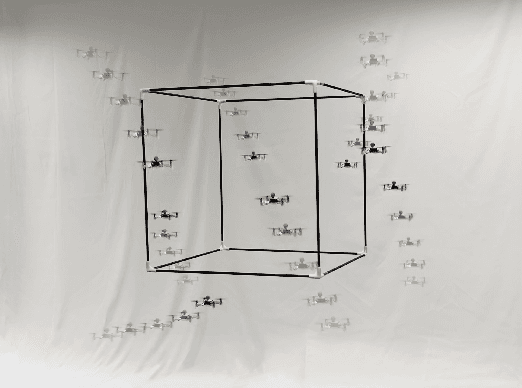

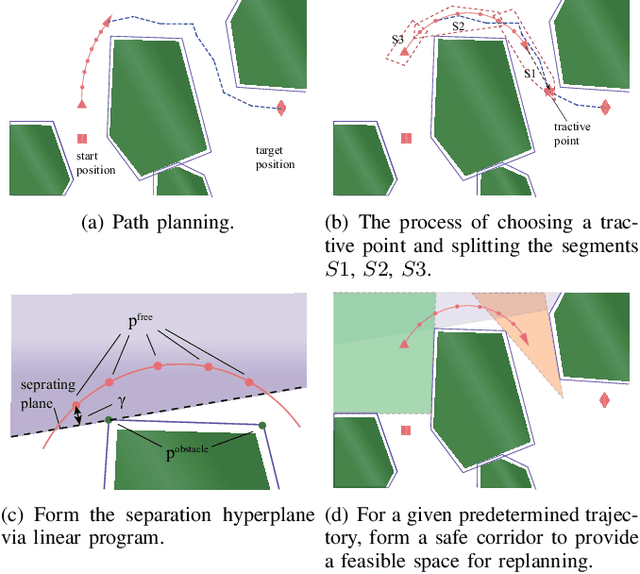

This article presents a multi-robot trajectory planning method which guarantees optimization feasibility and resolves deadlocks in an obstacle-dense environment. The method is proposed via formulating an optimization problem, where the modified buffered Voronoi cell with warning band is utilized to avoid the inter-robot collision and the deadlock is resolved by an adaptive right-hand rule. Meanwhile, a novel safe corridor derived from historical planned trajectory is proposed to provide a proper space for obstacle avoidance in trajectory planning. Comparisons with state-of-the-art works are conducted to illustrate the safety and deadlock resolution in cluttered scenarios. Additionally, hardware experiments are carried out to verify the performance of the proposed method where eight nano-quadrotors fly through a 0.6m cubic framework.