 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViko: An Adaptive Gecko Gripper with Vision-based Tactile Sensor
May 03, 2021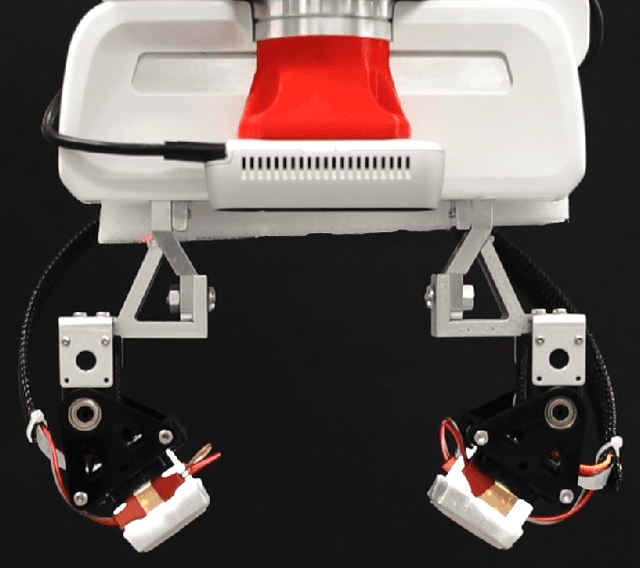
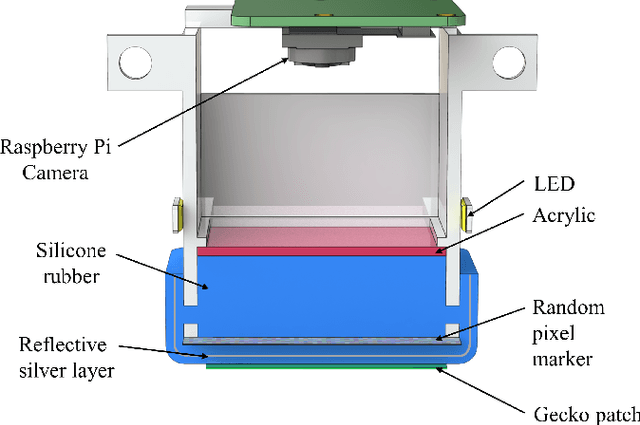
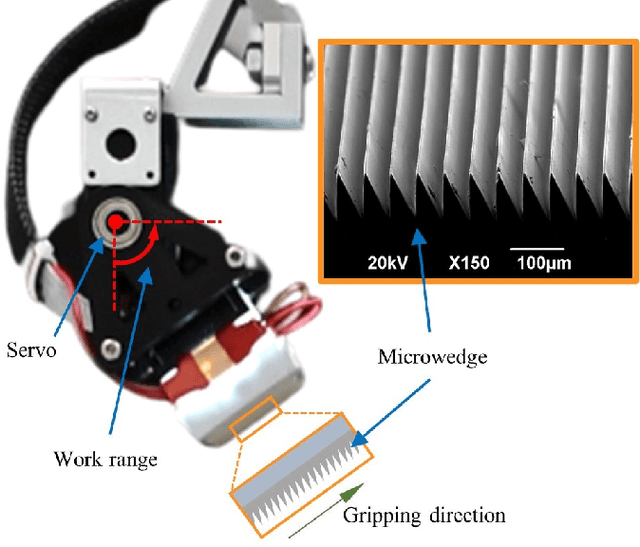
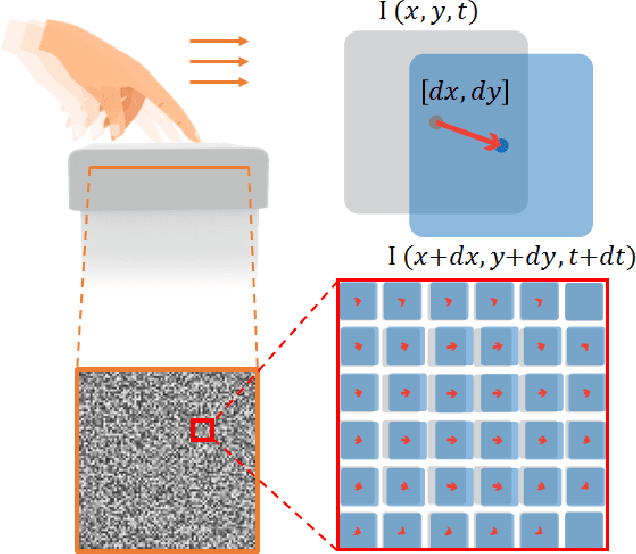
Monitoring the state of contact is essential for robotic devices, especially grippers that implement gecko-inspired adhesives where intimate contact is crucial for a firm attachment. However, due to the lack of deformable sensors, few have demonstrated tactile sensing for gecko grippers. We present Viko, an adaptive gecko gripper that utilizes vision-based tactile sensors to monitor contact state. The sensor provides high-resolution real-time measurements of contact area and shear force. Moreover, the sensor is adaptive, low-cost, and compact. We integrated gecko-inspired adhesives into the sensor surface without impeding its adaptiveness and performance. Using a robotic arm, we evaluate the performance of the gripper by a series of grasping test. The gripper has a maximum payload of 8N even at a low fingertip pitch angle of 30 degrees. We also showcase the gripper's ability to adjust fingertip pose for better contact using sensor feedback. Further, everyday object picking is presented as a demonstration of the gripper's adaptiveness.
A Flexible Connector for Soft Modular Robots Based on Micropatterned Intersurface Jamming
Apr 10, 2020
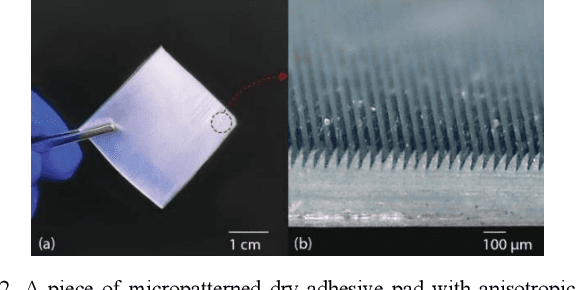
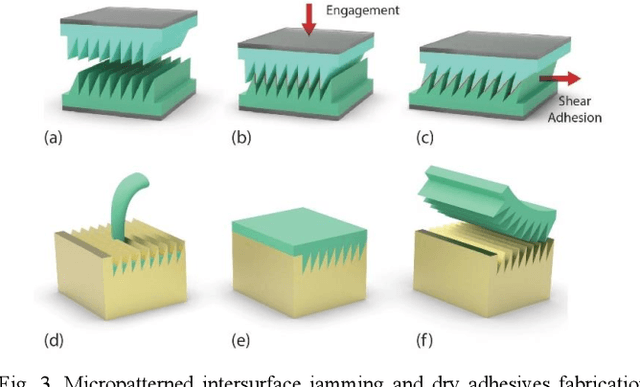
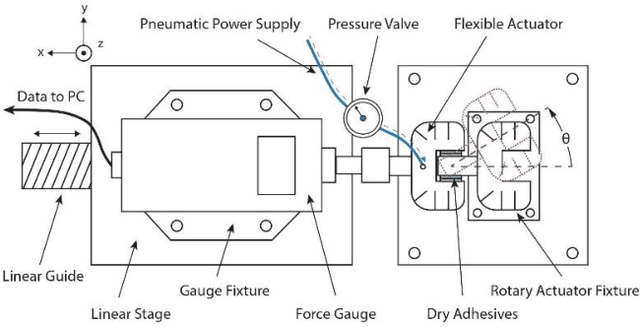
Soft modular robots enable more flexibility and safer interaction with the changing environment than traditional robots. However, it has remained challenging to create deformable connectors that can be integrated into soft machines. In this work, we propose a flexible connector for soft modular robots based on micropatterned intersurface jamming. The connector is composed of micropatterned dry adhesives made by silicone rubber and a flexible main body with inflatable chambers for active engagement and disengagement. Through connection force tests, we evaluate the characteristics of the connector both in the linear direction and under rotational disruptions. The connector can stably support an average maximum load of 22 N (83 times the connector's body weight) linearly and 10.86 N under planar rotation. The proposed connector demonstrates the potential to create a robust connection between soft modular robots without raising the system's overall stiffness; thus guarantees high flexibility of the robotic system.
FingerVision Tactile Sensor Design and Slip Detection Using Convolutional LSTM Network
Oct 05, 2018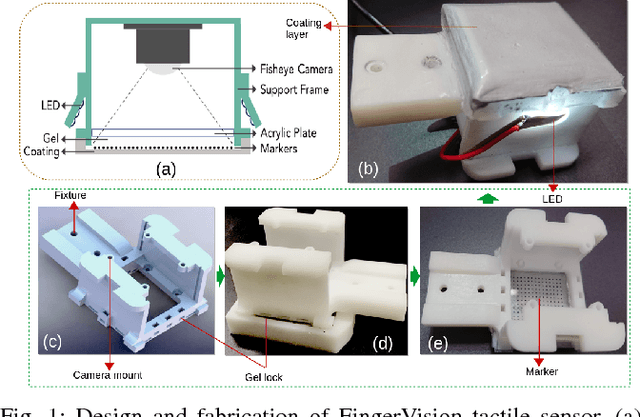
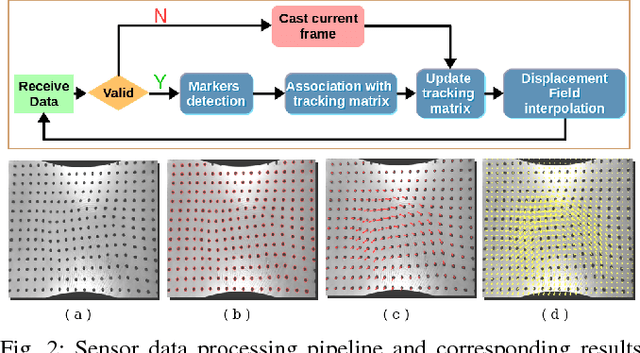

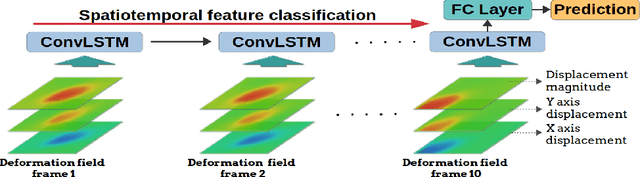
Tactile sensing is essential to the human perception system, so as to robot. In this paper, we develop a novel optical-based tactile sensor "FingerVision" with effective signal processing algorithms. This sensor is composed of soft skin with embedded marker array bonded to rigid frame, and a web camera with a fisheye lens. While being excited with contact force, the camera tracks the movements of markers and deformation field is obtained. Compared to existing tactile sensors, our sensor features compact footprint, high resolution, and ease of fabrication. Besides, utilizing the deformation field estimation, we propose a slip classification framework based on convolution Long Short Term Memory (convolutional LSTM) networks. The data collection process takes advantage of the human sense of slip, during which human hand holds 12 daily objects, interacts with sensor skin and labels data with a slip or non-slip identity based on human feeling of slip. Our slip classification framework performs high accuracy of 97.62% on the test dataset. It is expected to be capable of enhancing the stability of robot grasping significantly, leading to better contact force control, finer object interaction and more active sensing manipulation.