 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViko 2.0: A Hierarchical Gecko-inspired Adhesive Gripper with Visuotactile Sensor
Apr 21, 2022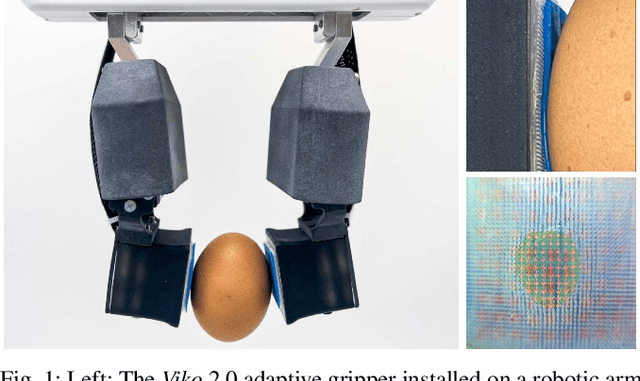
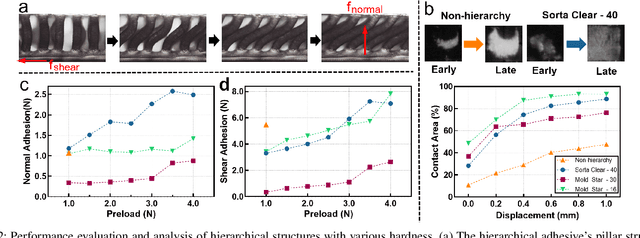

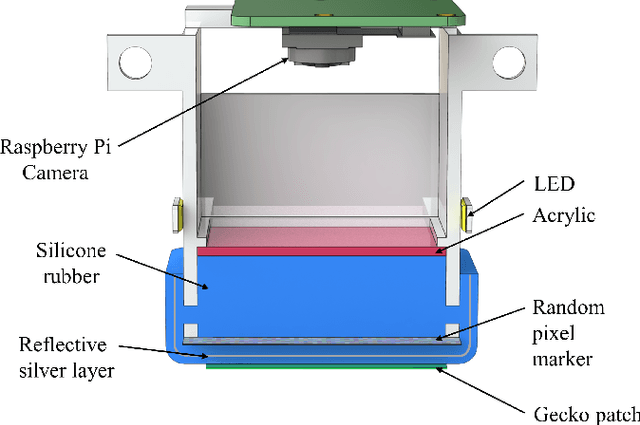
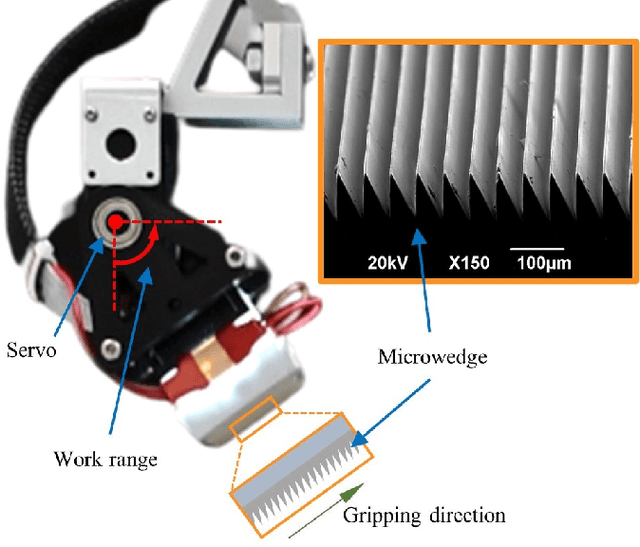
Robotic grippers with visuotactile sensors have access to rich tactile information for grasping tasks but encounter difficulty in partially encompassing large objects with sufficient grip force. While hierarchical gecko-inspired adhesives are a potential technique for bridging performance gaps, they require a large contact area for efficient usage. In this work, we present a new version of an adaptive gecko gripper called Viko 2.0 that effectively combines the advantage of adhesives and visuotactile sensors. Compared with a non-hierarchical structure, a hierarchical structure with a multimaterial design achieves approximately a 1.5 times increase in normal adhesion and double in contact area. The integrated visuotactile sensor captures a deformation image of the hierarchical structure and provides a real-time measurement of contact area, shear force, and incipient slip detection at 24 Hz. The gripper is implemented on a robotic arm to demonstrate an adaptive grasping pose based on contact area, and grasps objects with a wide range of geometries and textures.
Viko: An Adaptive Gecko Gripper with Vision-based Tactile Sensor
May 03, 2021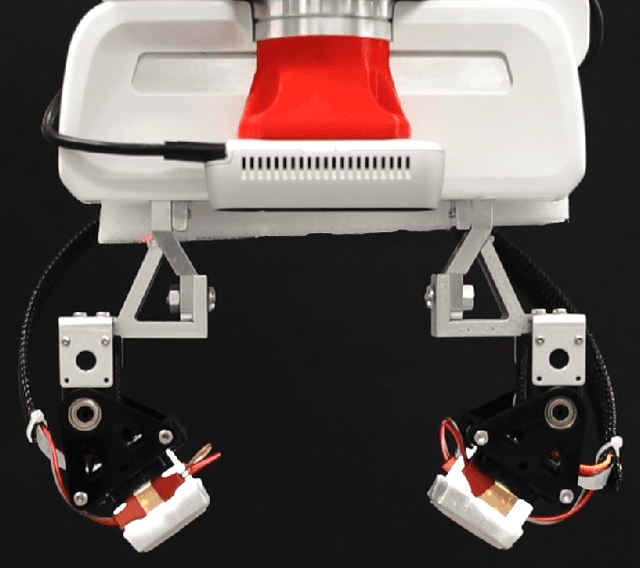
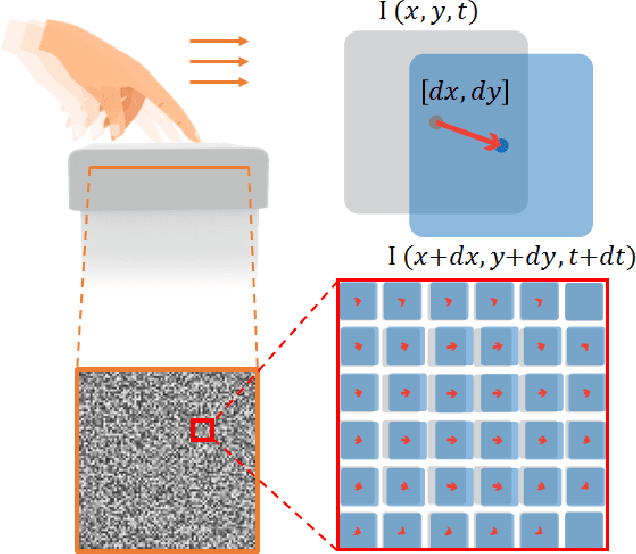
Monitoring the state of contact is essential for robotic devices, especially grippers that implement gecko-inspired adhesives where intimate contact is crucial for a firm attachment. However, due to the lack of deformable sensors, few have demonstrated tactile sensing for gecko grippers. We present Viko, an adaptive gecko gripper that utilizes vision-based tactile sensors to monitor contact state. The sensor provides high-resolution real-time measurements of contact area and shear force. Moreover, the sensor is adaptive, low-cost, and compact. We integrated gecko-inspired adhesives into the sensor surface without impeding its adaptiveness and performance. Using a robotic arm, we evaluate the performance of the gripper by a series of grasping test. The gripper has a maximum payload of 8N even at a low fingertip pitch angle of 30 degrees. We also showcase the gripper's ability to adjust fingertip pose for better contact using sensor feedback. Further, everyday object picking is presented as a demonstration of the gripper's adaptiveness.