 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViko: An Adaptive Gecko Gripper with Vision-based Tactile Sensor
Paper and Code
May 03, 2021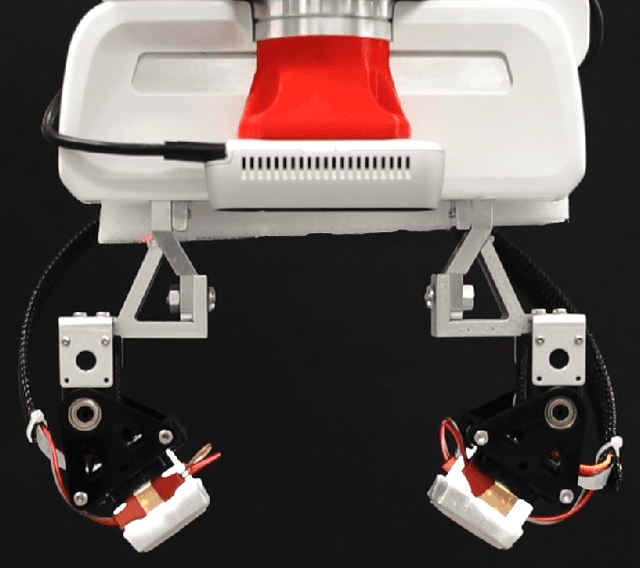
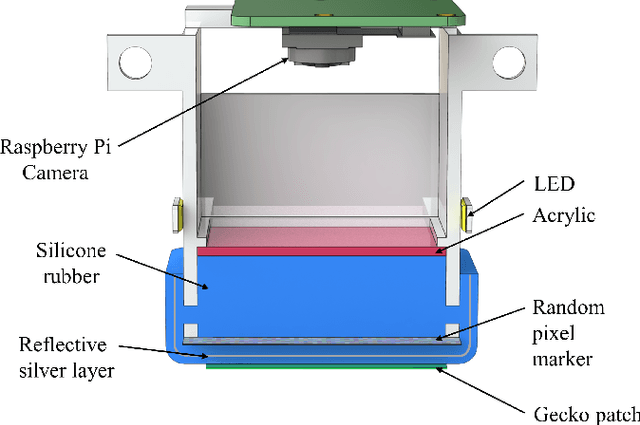
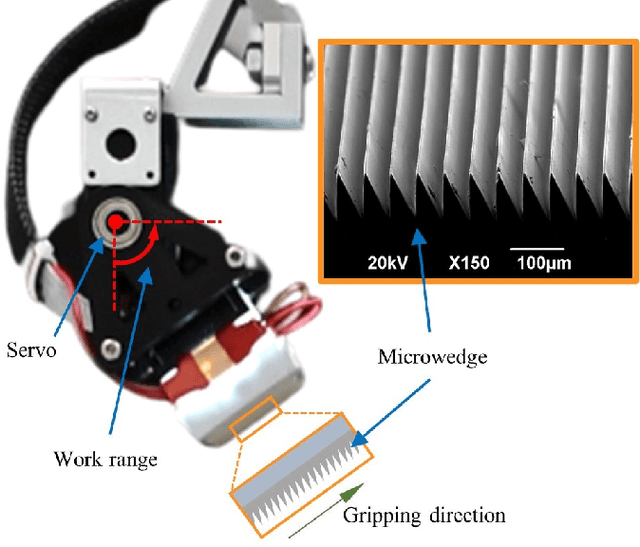
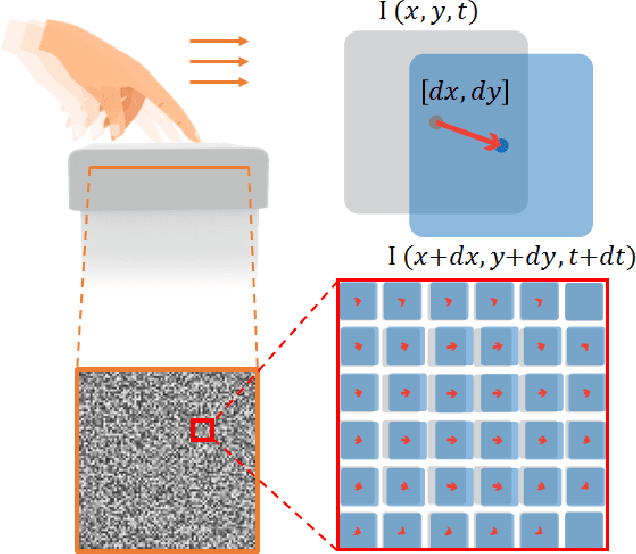
Monitoring the state of contact is essential for robotic devices, especially grippers that implement gecko-inspired adhesives where intimate contact is crucial for a firm attachment. However, due to the lack of deformable sensors, few have demonstrated tactile sensing for gecko grippers. We present Viko, an adaptive gecko gripper that utilizes vision-based tactile sensors to monitor contact state. The sensor provides high-resolution real-time measurements of contact area and shear force. Moreover, the sensor is adaptive, low-cost, and compact. We integrated gecko-inspired adhesives into the sensor surface without impeding its adaptiveness and performance. Using a robotic arm, we evaluate the performance of the gripper by a series of grasping test. The gripper has a maximum payload of 8N even at a low fingertip pitch angle of 30 degrees. We also showcase the gripper's ability to adjust fingertip pose for better contact using sensor feedback. Further, everyday object picking is presented as a demonstration of the gripper's adaptiveness.