 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFingerVision Tactile Sensor Design and Slip Detection Using Convolutional LSTM Network
Paper and Code
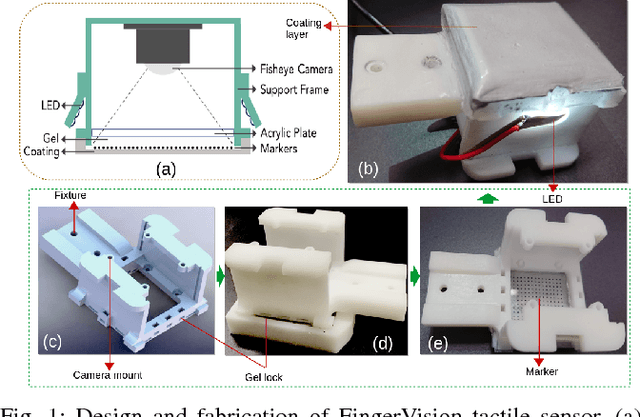
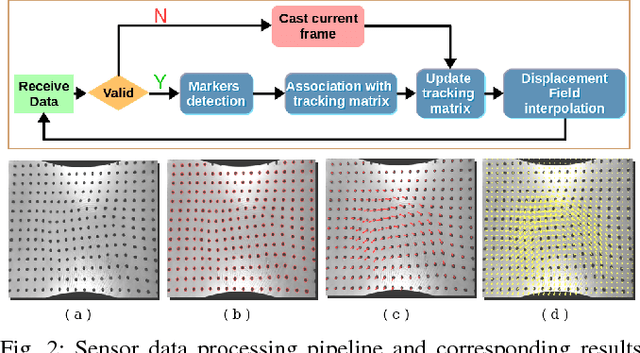

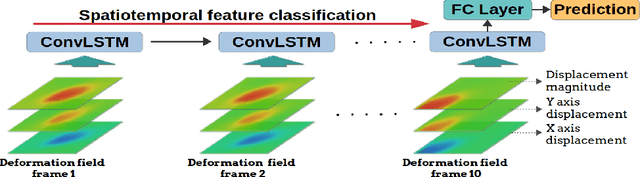
Tactile sensing is essential to the human perception system, so as to robot. In this paper, we develop a novel optical-based tactile sensor "FingerVision" with effective signal processing algorithms. This sensor is composed of soft skin with embedded marker array bonded to rigid frame, and a web camera with a fisheye lens. While being excited with contact force, the camera tracks the movements of markers and deformation field is obtained. Compared to existing tactile sensors, our sensor features compact footprint, high resolution, and ease of fabrication. Besides, utilizing the deformation field estimation, we propose a slip classification framework based on convolution Long Short Term Memory (convolutional LSTM) networks. The data collection process takes advantage of the human sense of slip, during which human hand holds 12 daily objects, interacts with sensor skin and labels data with a slip or non-slip identity based on human feeling of slip. Our slip classification framework performs high accuracy of 97.62% on the test dataset. It is expected to be capable of enhancing the stability of robot grasping significantly, leading to better contact force control, finer object interaction and more active sensing manipulation.