 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Enhancement Network for Low-quality Multi-spectral Vehicle Re-identification
Apr 21, 2025The performance of multi-spectral vehicle Re-identification (ReID) is significantly degraded when some important discriminative cues in visible, near infrared and thermal infrared spectra are lost. Existing methods generate or enhance missing details in low-quality spectra data using the high-quality one, generally called the primary spectrum, but how to justify the primary spectrum is a challenging problem. In addition, when the quality of the primary spectrum is low, the enhancement effect would be greatly degraded, thus limiting the performance of multi-spectral vehicle ReID. To address these problems, we propose the Collaborative Enhancement Network (CoEN), which generates a high-quality proxy from all spectra data and leverages it to supervise the selection of primary spectrum and enhance all spectra features in a collaborative manner, for robust multi-spectral vehicle ReID. First, to integrate the rich cues from all spectra data, we design the Proxy Generator (PG) to progressively aggregate multi-spectral features. Second, we design the Dynamic Quality Sort Module (DQSM), which sorts all spectra data by measuring their correlations with the proxy, to accurately select the primary spectra with the highest correlation. Finally, we design the Collaborative Enhancement Module (CEM) to effectively compensate for missing contents of all spectra by collaborating the primary spectra and the proxy, thereby mitigating the impact of low-quality primary spectra. Extensive experiments on three benchmark datasets are conducted to validate the efficacy of the proposed approach against other multi-spectral vehicle ReID methods. The codes will be released at https://github.com/yongqisun/CoEN.
A Correlation Information-based Spatiotemporal Network for Traffic Flow Forecasting
May 20, 2022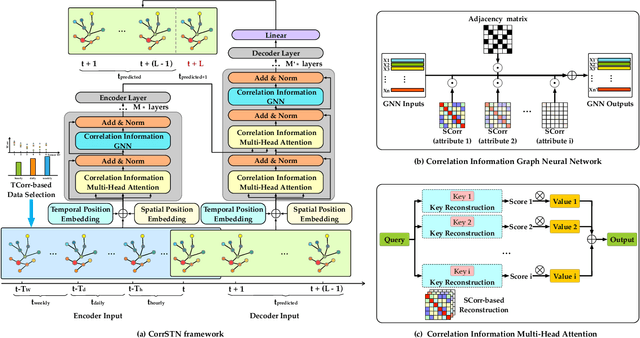
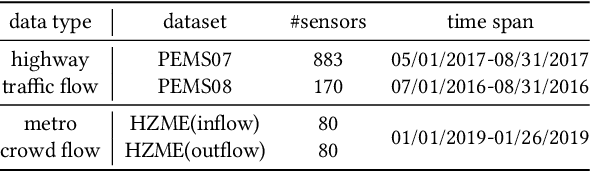
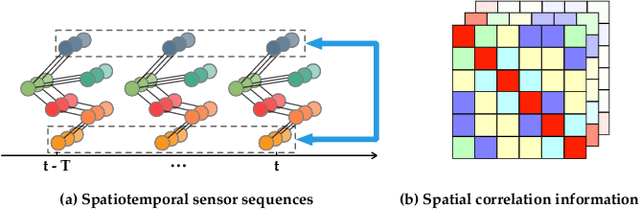
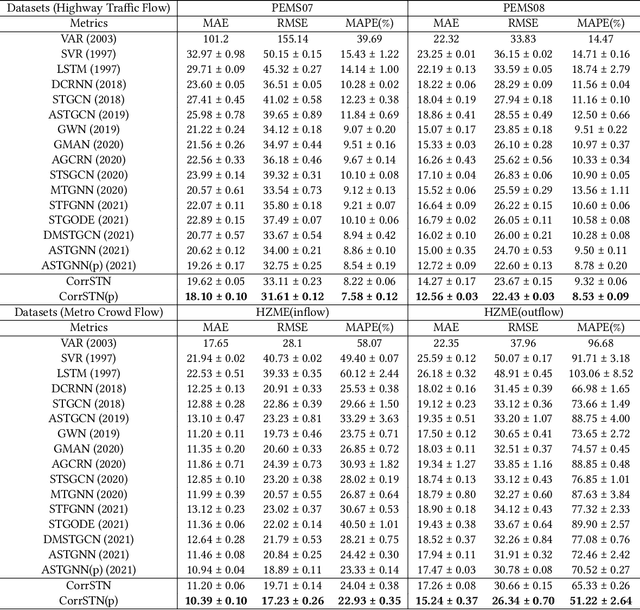
With the growth of transport modes, high traffic forecasting precision is required in intelligent transportation systems. Most previous works utilize the transformer architecture based on graph neural networks and attention mechanisms to discover spatiotemporal dependencies and dynamic relationships. The correlation information among spatiotemporal sequences, however, has not been thoroughly considered. In this paper, we present two elaborate spatiotemporal representations, spatial correlation information (SCorr) and temporal correlation information (TCorr), among spatiotemporal sequences based on the maximal information coefficient. Using SCorr, we propose a novel correlation information-based spatiotemporal network (CorrSTN), including a dynamic graph neural network component incorporating correlation information into the spatial structure effectively and a multi-head attention component utilizing spatial correlation information to extract dynamic temporal dependencies accurately. Using TCorr, we further explore the correlation pattern among different periodic data and then propose a novel data selection scheme to identify the most relevant data. The experimental results on the highway traffic flow (PEMS07 and PEMS08) and metro crowd flow (HZME inflow and outflow) datasets demonstrate that CorrSTN outperforms the state-of-the-art methods in terms of predictive performance. In particular, on the HZME (outflow) dataset, our model makes significant improvements compared with the latest model ASTGNN by 12.7%, 14.4% and 27.4% in the metrics of MAE, RMSE and MAPE, respectively.
A Synchronized Reprojection-based Model for 3D Human Pose Estimation
Jun 16, 2021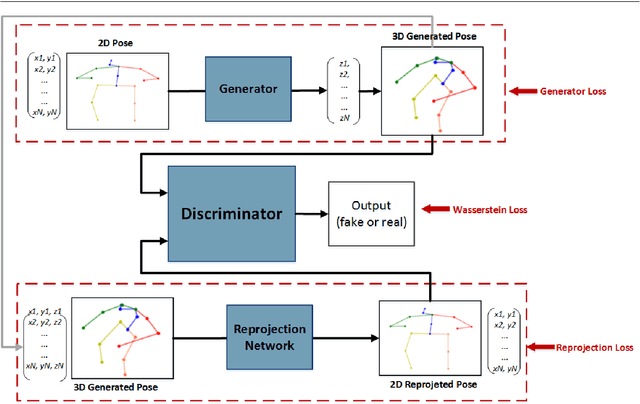
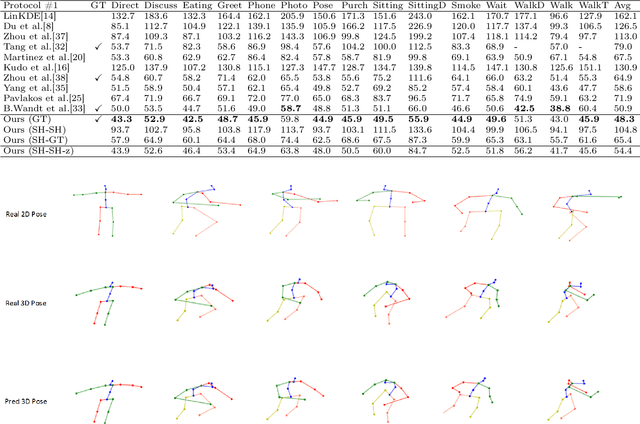
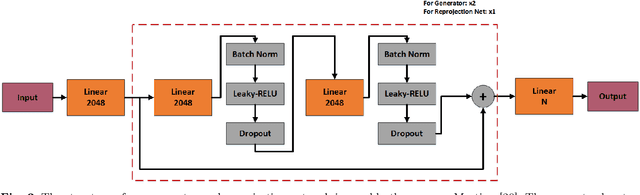
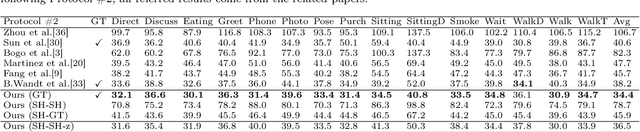
3D human pose estimation is still a challenging problem despite the large amount of work that has been done in this field. Generally, most methods directly use neural networks and ignore certain constraints (e.g., reprojection constraints and joint angle and bone length constraints). This paper proposes a weakly supervised GAN-based model for 3D human pose estimation that considers 3D information along with 2D information simultaneously, in which a reprojection network is employed to learn the mapping of the distribution from 3D poses to 2D poses. In particular, we train the reprojection network and the generative adversarial network synchronously. Furthermore, inspired by the typical kinematic chain space (KCS) matrix, we propose a weighted KCS matrix, which is added into the discriminator's input to impose joint angle and bone length constraints. The experimental results on Human3.6M show that our method outperforms state-of-the-art methods by approximately 5.1\%.
SVMA: A GAN-based model for Monocular 3D Human Pose Estimation
Jun 16, 2021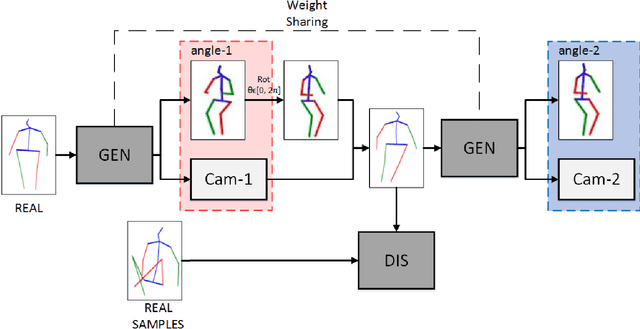
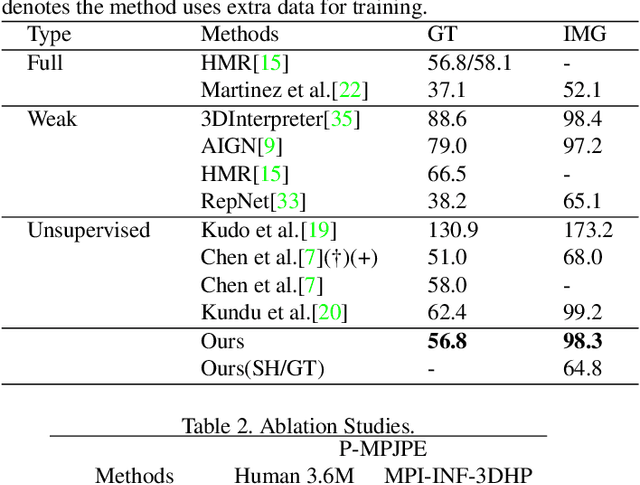
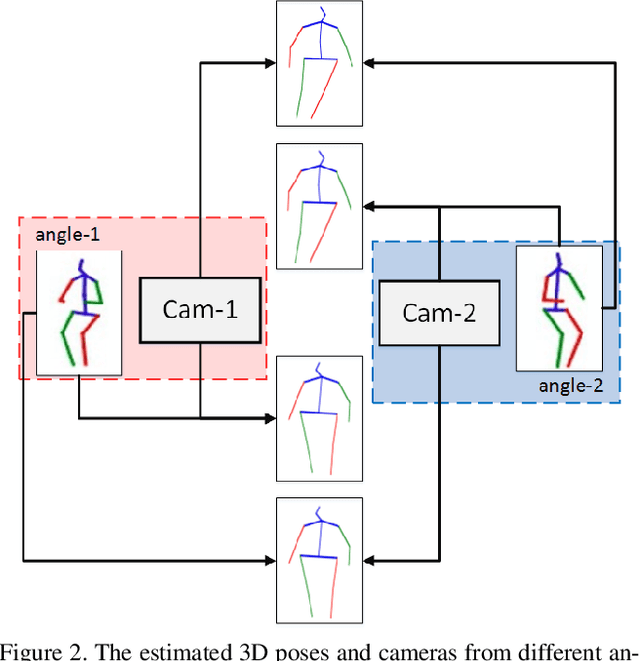
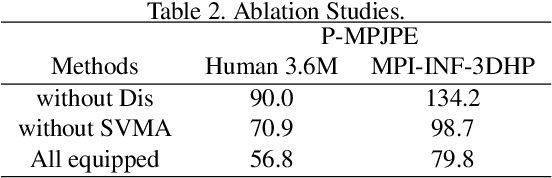
Recovering 3D human pose from 2D joints is a highly unconstrained problem, especially without any video or multi-view information. We present an unsupervised GAN-based model to recover 3D human pose from 2D joint locations extracted from a single image. Our model uses a GAN to learn the mapping of distribution from 2D poses to 3D poses, not the simple 2D-3D correspondence. Considering the reprojection constraint, our model can estimate the camera so that we can reproject the estimated 3D pose to the original 2D pose. Based on this reprojection method, we can rotate and reproject the generated pose to get our "new" 2D pose and then use a weight sharing generator to estimate the "new" 3D pose and a "new" camera. Through the above estimation process, we can define the single-view-multi-angle consistency loss during training to simulate multi-view consistency, which means the 3D poses and cameras estimated from two angles of a single view should be able to be mixed to generate rich 2D reprojections, and the 2D reprojections reprojected from the same 3D pose should be consistent. The experimental results on Human3.6M show that our method outperforms all the state-of-the-art methods, and results on MPI-INF-3DHP show that our method outperforms state-of-the-art by approximately 15.0%.
An Effective Dynamic Spatio-temporal Framework with Multi-Source Information for Traffic Prediction
May 08, 2020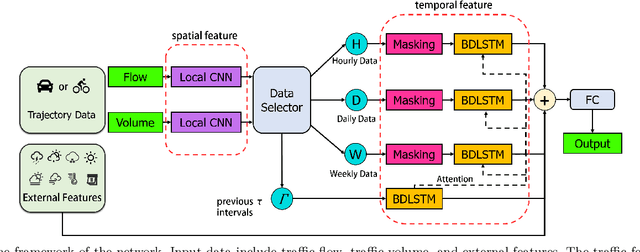
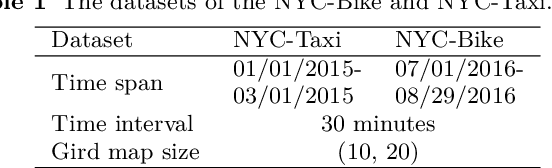
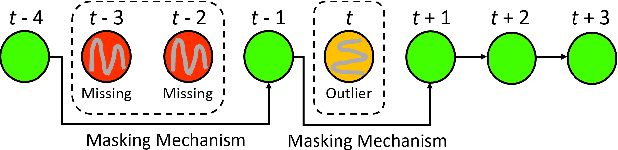
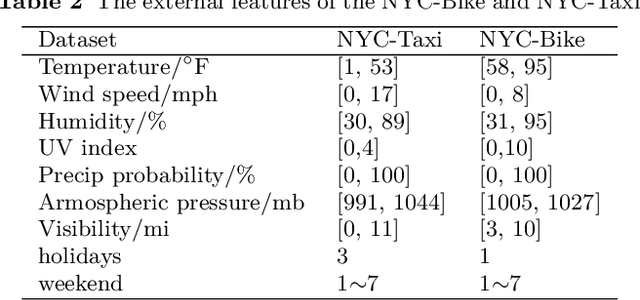
Traffic prediction is necessary not only for management departments to dispatch vehicles but also for drivers to avoid congested roads. Many traffic forecasting methods based on deep learning have been proposed in recent years, and their main aim is to solve the problem of spatial dependencies and temporal dynamics. In this paper, we propose a useful dynamic model to predict the urban traffic volume by combining fully bidirectional LSTM, the more complex attention mechanism, and the external features, including weather conditions and events. First, we adopt the bidirectional LSTM to obtain temporal dependencies of traffic volume dynamically in each layer, which is different from the hybrid methods combining bidirectional and unidirectional ones; second, we use a more elaborate attention mechanism to learn short-term and long-term periodic temporal dependencies; and finally, we collect the weather conditions and events as the external features to further improve the prediction precision. The experimental results show that the proposed model improves the prediction precision by approximately 3-7 percent on the NYC-Taxi and NYC-Bike datasets compared to the most recently developed method, being a useful tool for the urban traffic prediction.