 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Exact NPN Classification with Influence-aided Canonical Form
Aug 23, 2023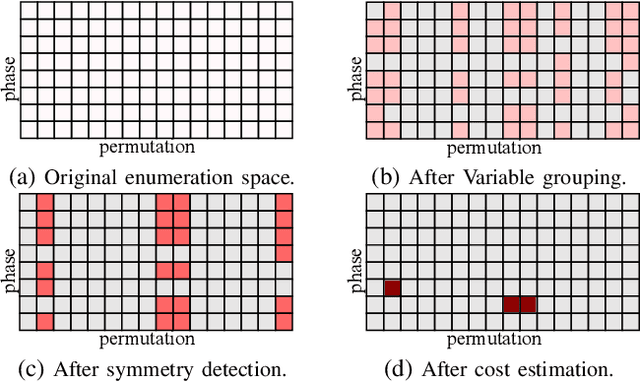
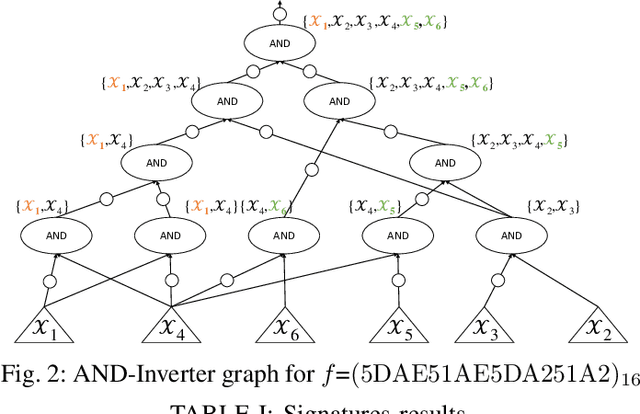
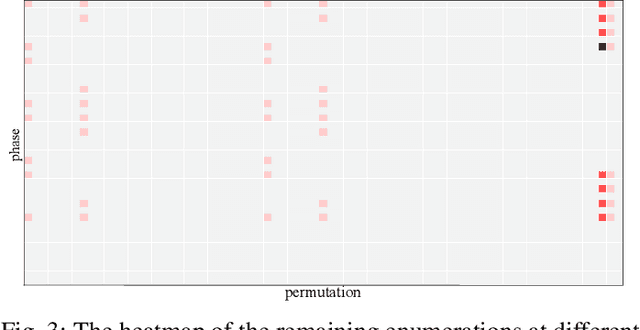
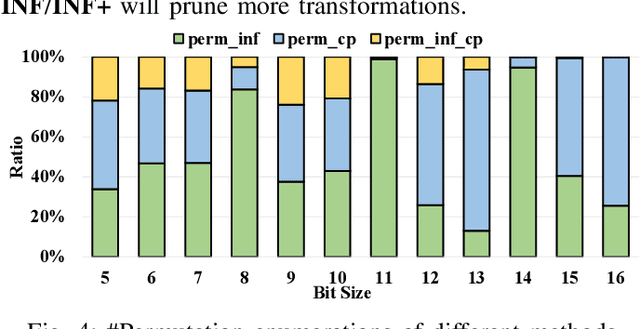
NPN classification has many applications in the synthesis and verification of digital circuits. The canonical-form-based method is the most common approach, designing a canonical form as representative for the NPN equivalence class first and then computing the transformation function according to the canonical form. Most works use variable symmetries and several signatures, mainly based on the cofactor, to simplify the canonical form construction and computation. This paper describes a novel canonical form and its computation algorithm by introducing Boolean influence to NPN classification, which is a basic concept in analysis of Boolean functions. We show that influence is input-negation-independent, input-permutation-dependent, and has other structural information than previous signatures for NPN classification. Therefore, it is a significant ingredient in speeding up NPN classification. Experimental results prove that influence plays an important role in reducing the transformation enumeration in computing the canonical form. Compared with the state-of-the-art algorithm implemented in ABC, our influence-aided canonical form for exact NPN classification gains up to 5.5x speedup.
Controllable Length Control Neural Encoder-Decoder via Reinforcement Learning
Sep 17, 2019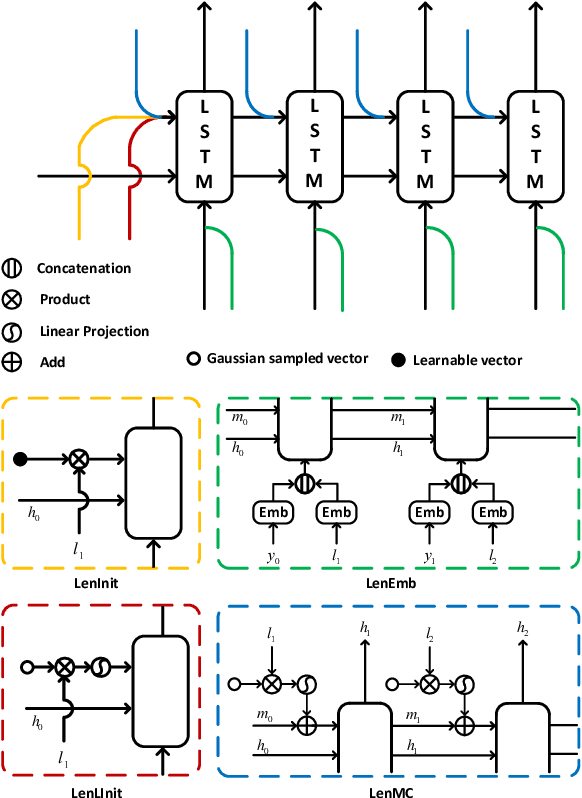
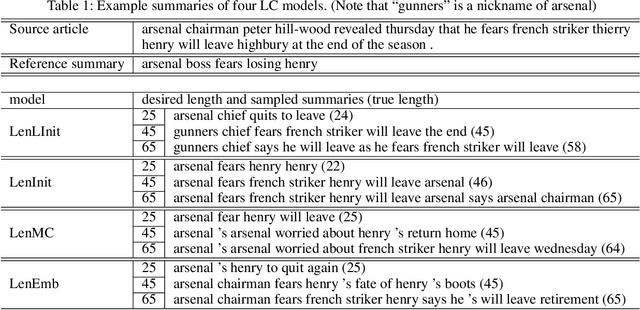
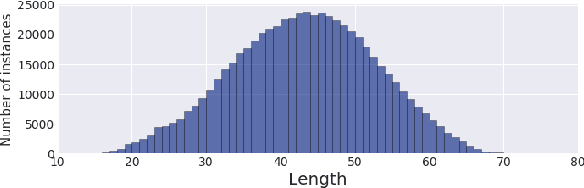
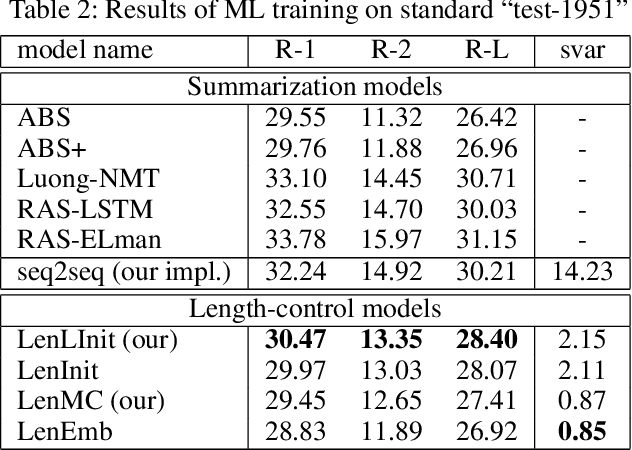
Controlling output length in neural language generation is valuable in many scenarios, especially for the tasks that have length constraints. A model with stronger length control capacity can produce sentences with more specific length, however, it usually sacrifices semantic accuracy of the generated sentences. Here, we denote a concept of Controllable Length Control (CLC) for the trade-off between length control capacity and semantic accuracy of the language generation model. More specifically, CLC is to alter length control capacity of the model so as to generate sentence with corresponding quality. This is meaningful in real applications when length control capacity and outputs quality are requested with different priorities, or to overcome unstability of length control during model training. In this paper, we propose two reinforcement learning (RL) methods to adjust the trade-off between length control capacity and semantic accuracy of length control models. Results show that our RL methods improve scores across a wide range of target lengths and achieve the goal of CLC. Additionally, two models LenMC and LenLInit modified on previous length-control models are proposed to obtain better performance in summarization task while still maintain the ability to control length.