 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Learning with Unsupervised Skill Discovery for Highway Merging Applications
Feb 04, 2023



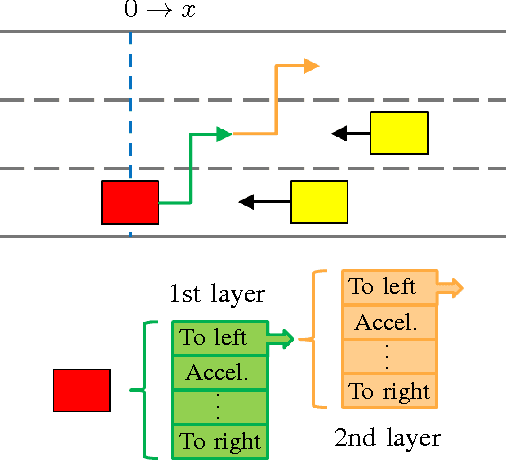
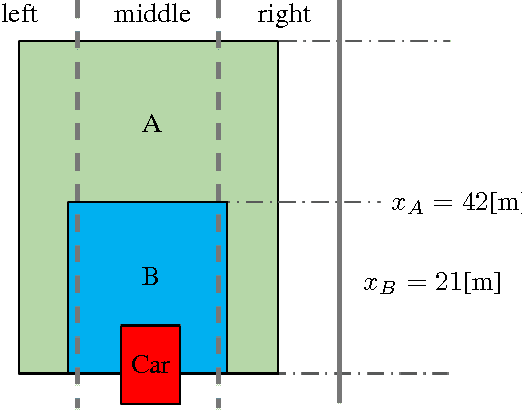
Driving in dense traffic with human and autonomous drivers is a challenging task that requires high level planning and reasoning along with the ability to react quickly to changes in a dynamic environment. In this study, we propose a hierarchical learning approach that uses learned motion primitives as actions. Motion primitives are obtained using unsupervised skill discovery without a predetermined reward function, allowing them to be reused in different scenarios. This can reduce the total training time for applications that need to obtain multiple models with varying behavior. Simulation results demonstrate that the proposed approach yields driver models that achieve higher performance with less training compared to baseline reinforcement learning methods.
Modeling Human Driver Interactions Using an Infinite Policy Space Through Gaussian Processes
Jan 03, 2022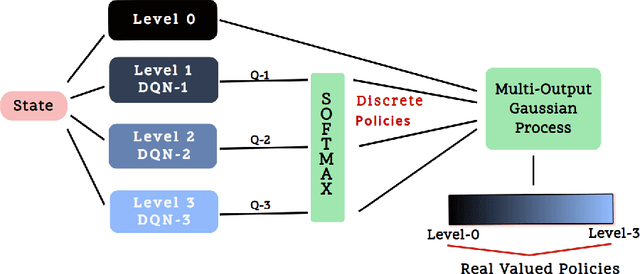

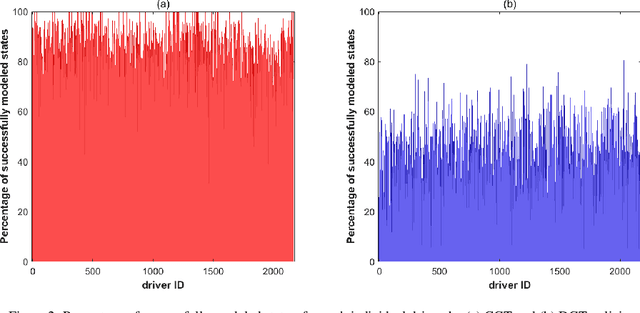
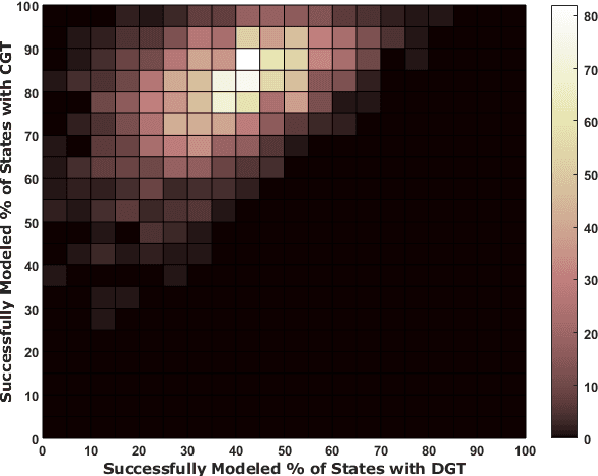
This paper proposes a method for modeling human driver interactions that relies on multi-output gaussian processes. The proposed method is developed as a refinement of the game theoretical hierarchical reasoning approach called "level-k reasoning" which conventionally assigns discrete levels of behaviors to agents. Although it is shown to be an effective modeling tool, the level-k reasoning approach may pose undesired constraints for predicting human decision making due to a limited number (usually 2 or 3) of driver policies it extracts. The proposed approach is put forward to fill this gap in the literature by introducing a continuous domain framework that enables an infinite policy space. By using the approach presented in this paper, more accurate driver models can be obtained, which can then be employed for creating high fidelity simulation platforms for the validation of autonomous vehicle control algorithms. The proposed method is validated on a real traffic dataset and compared with the conventional level-k approach to demonstrate its contributions and implications.
Driver Modeling through Deep Reinforcement Learning and Behavioral Game Theory
Mar 24, 2020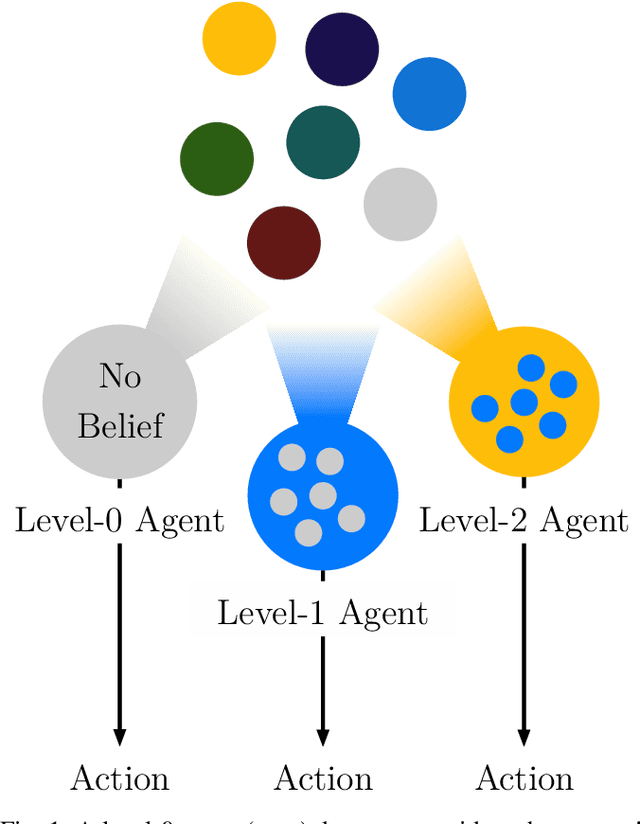

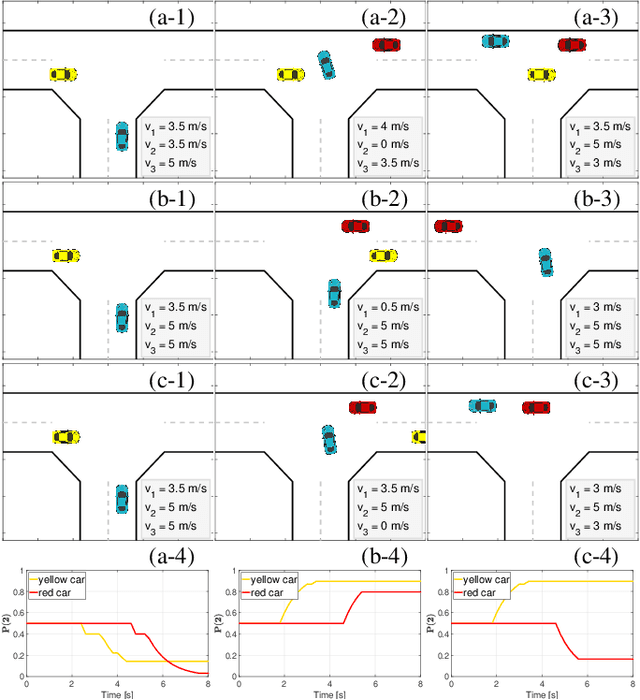
In this paper, a synergistic combination of deep reinforcement learning and hierarchical game theory is proposed as a modeling framework for behavioral predictions of drivers in highway driving scenarios. The need for a modeling framework that can address multiple human-human and human-automation interactions, where all the agents can be modeled as decision makers simultaneously, is the main motivation behind this work. Such a modeling framework may be utilized for the validation and verification of autonomous vehicles: It is estimated that for an autonomous vehicle to reach the same safety level of cars with drivers, millions of miles of driving tests are required. The modeling framework presented in this paper may be used in a high-fidelity traffic simulator consisting of multiple human decision makers to reduce the time and effort spent for testing by allowing safe and quick assessment of self-driving algorithms. To demonstrate the fidelity of the proposed modeling framework, game theoretical driver models are compared with real human driver behavior patterns extracted from traffic data.
Game-theoretic Modeling of Traffic in Unsignalized Intersection Network for Autonomous Vehicle Control Verification and Validation
Oct 20, 2019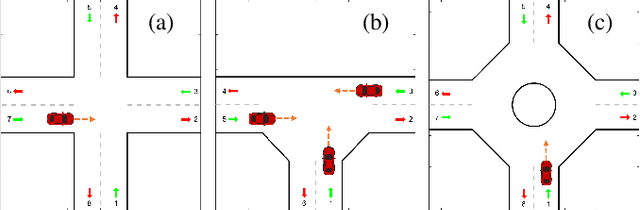
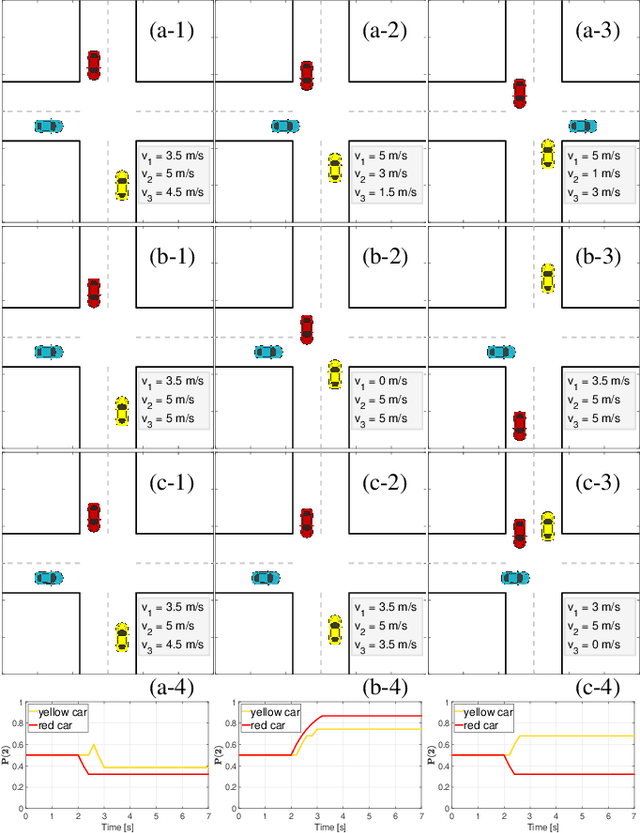
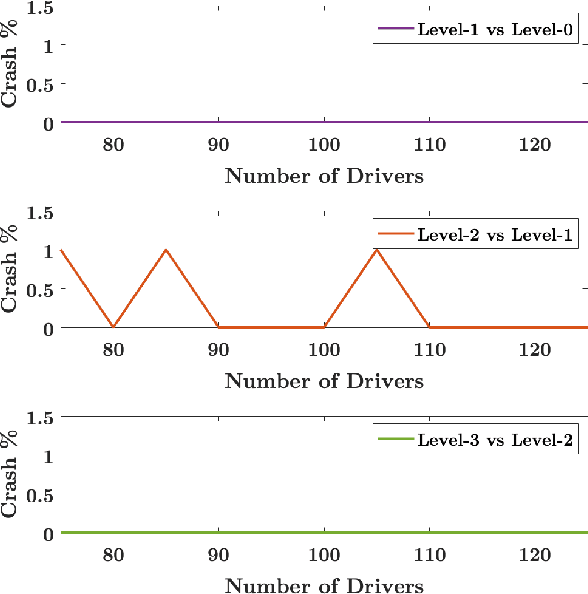
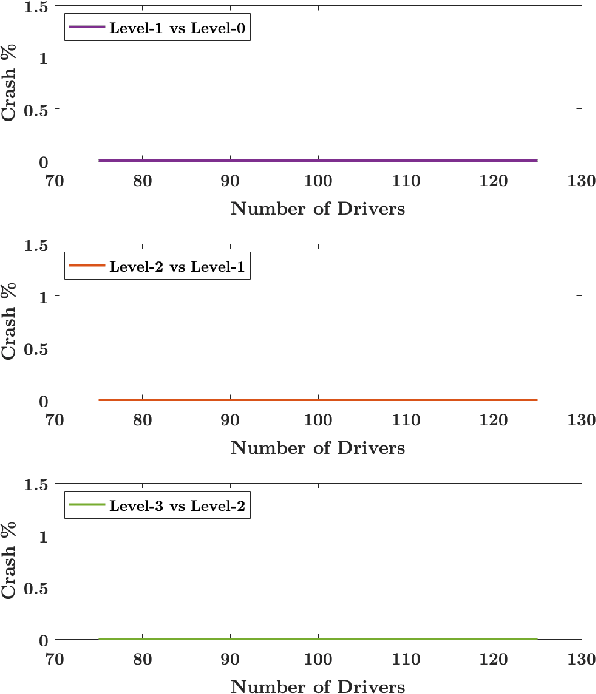
For a foreseeable future, autonomous vehicles (AVs) will operate in traffic together with human-driven vehicles. The AV planning and control systems need extensive testing, including early-stage testing in simulations where the interactions among autonomous/human-driven vehicles are represented. Motivated by the need for such simulation tools, we propose a game-theoretic approach to modeling vehicle interactions, in particular, for urban traffic environments with unsignalized intersections. We develop traffic models with heterogeneous (in terms of their driving styles) and interactive vehicles based on our proposed approach, and use them for virtual testing, evaluation, and calibration of AV control systems. For illustration, we consider two AV control approaches, analyze their characteristics and performance based on the simulation results with our developed traffic models, and optimize the parameters of one of them.
Modeling Cyber-Physical Human Systems via an Interplay Between Reinforcement Learning and Game Theory
Oct 11, 2019
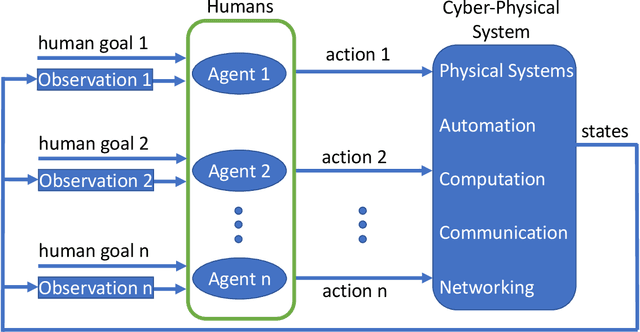
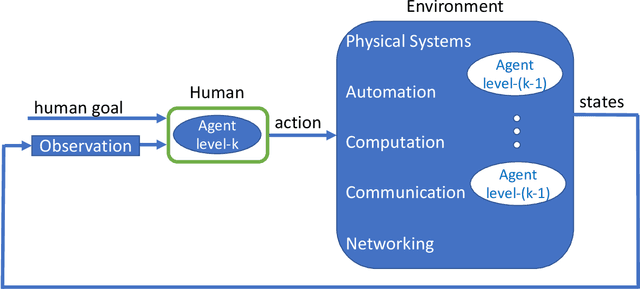
Predicting the outcomes of cyber-physical systems with multiple human interactions is a challenging problem. This article reviews a game theoretical approach to address this issue, where reinforcement learning is employed to predict the time-extended interaction dynamics. We explain that the most attractive feature of the method is proposing a computationally feasible approach to simultaneously model multiple humans as decision makers, instead of determining the decision dynamics of the intelligent agent of interest and forcing the others to obey certain kinematic and dynamic constraints imposed by the environment. We present two recent exploitations of the method to model 1) unmanned aircraft integration into the National Airspace System and 2) highway traffic. We conclude the article by providing ongoing and future work about employing, improving and validating the method. We also provide related open problems and research opportunities.
Adaptive Game-Theoretic Decision Making for Autonomous Vehicle Control at Roundabouts
Oct 01, 2018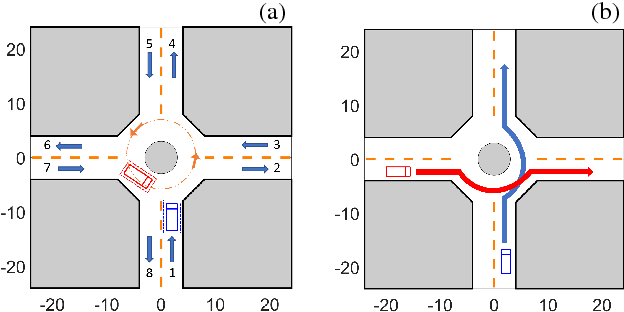
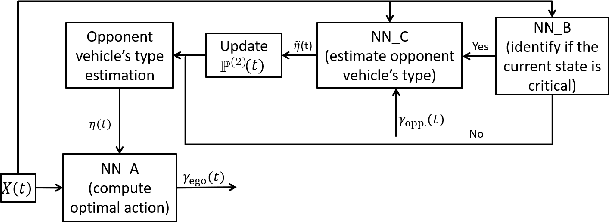
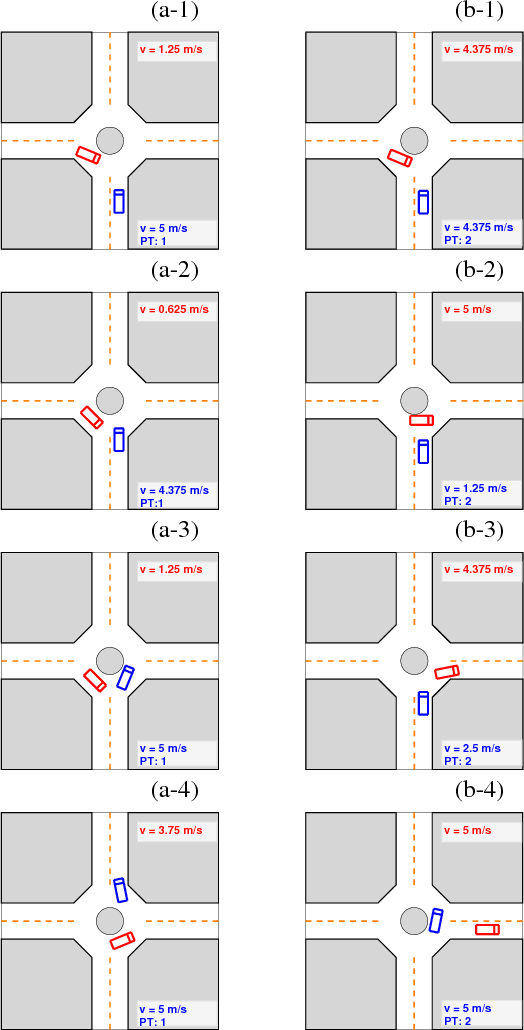
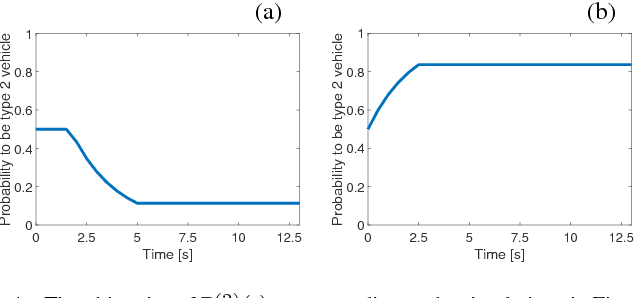
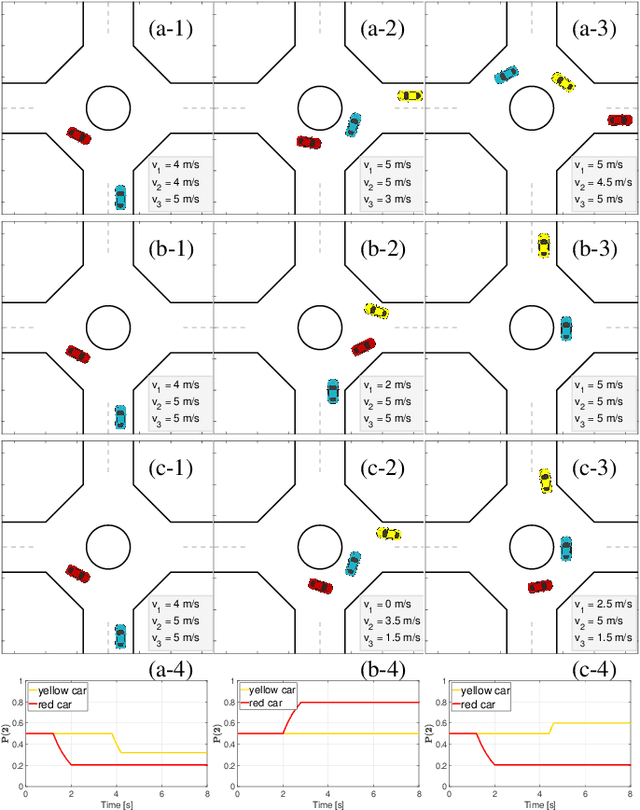
In this paper, we propose a decision making algorithm for autonomous vehicle control at a roundabout intersection. The algorithm is based on a game-theoretic model representing the interactions between the ego vehicle and an opponent vehicle, and adapts to an online estimated driver type of the opponent vehicle. Simulation results are reported.
A 3D Game Theoretical Framework for the Evaluation of Unmanned Aircraft Systems Airspace Integration Concepts
Feb 27, 2018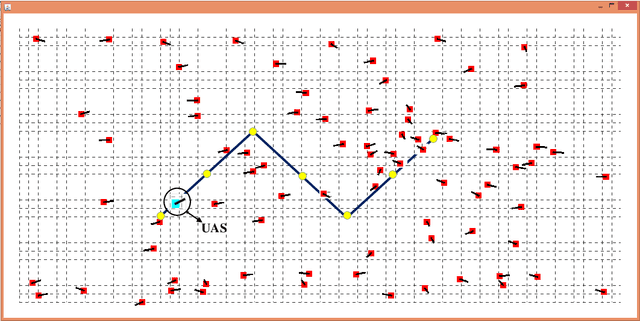
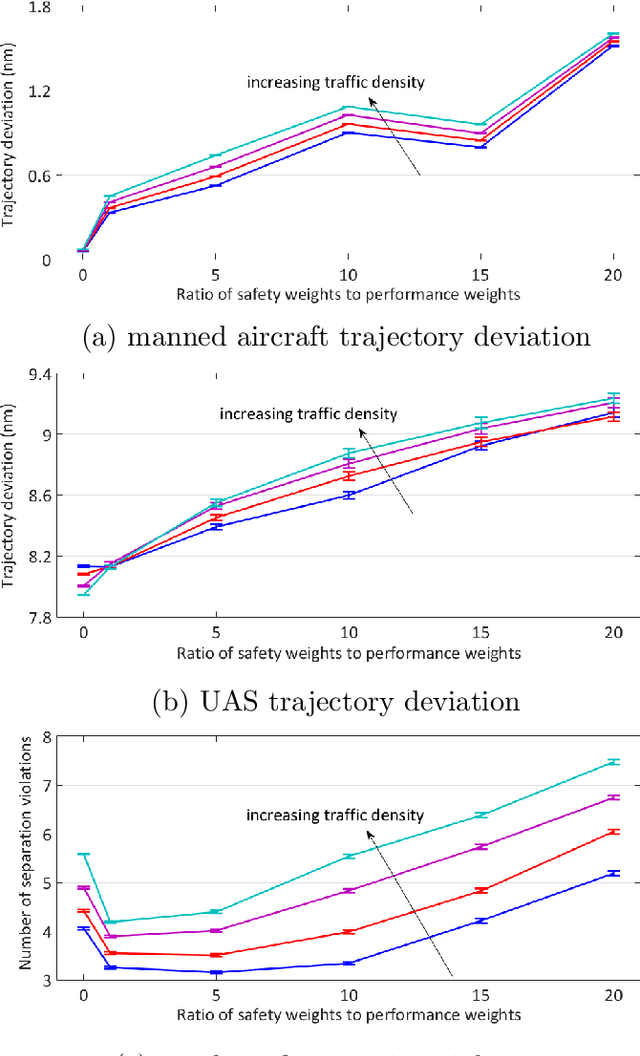
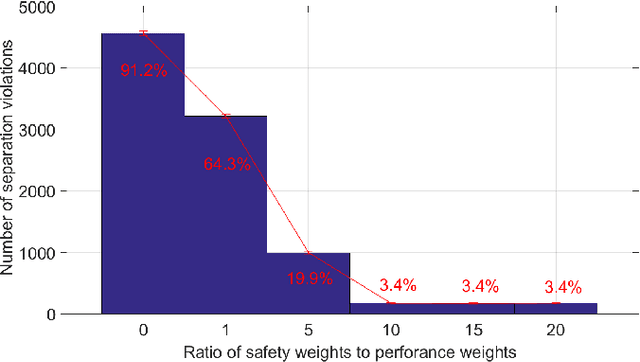
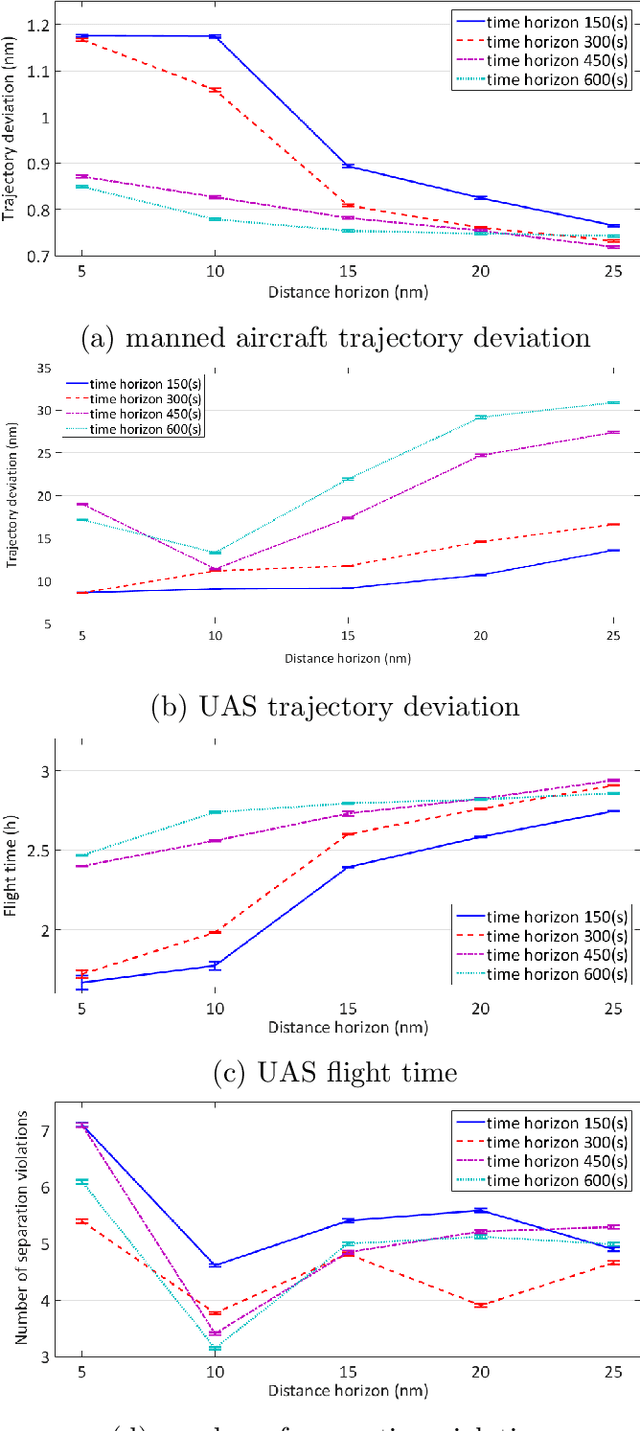
Predicting the outcomes of integrating Unmanned Aerial Systems (UAS) into the National Airspace System (NAS) is a complex problem which is required to be addressed by simulation studies before allowing the routine access of UAS into the NAS. This paper focuses on providing a 3-dimensional (3D) simulation framework using a game theoretical methodology to evaluate integration concepts using scenarios where manned and unmanned air vehicles co-exist. In the proposed method, human pilot interactive decision making process is incorporated into airspace models which can fill the gap in the literature where the pilot behavior is generally assumed to be known a priori. The proposed human pilot behavior is modeled using dynamic level-k reasoning concept and approximate reinforcement learning. The level-k reasoning concept is a notion in game theory and is based on the assumption that humans have various levels of decision making. In the conventional "static" approach, each agent makes assumptions about his or her opponents and chooses his or her actions accordingly. On the other hand, in the dynamic level-k reasoning, agents can update their beliefs about their opponents and revise their level-k rule. In this study, Neural Fitted Q Iteration, which is an approximate reinforcement learning method, is used to model time-extended decisions of pilots with 3D maneuvers. An analysis of UAS integration is conducted using an example 3D scenario in the presence of manned aircraft and fully autonomous UAS equipped with sense and avoid algorithms.
Game-Theoretic Modeling of Driver and Vehicle Interactions for Verification and Validation of Autonomous Vehicle Control Systems
Aug 30, 2016
Autonomous driving has been the subject of increased interest in recent years both in industry and in academia. Serious efforts are being pursued to address legal, technical and logistical problems and make autonomous cars a viable option for everyday transportation. One significant challenge is the time and effort required for the verification and validation of the decision and control algorithms employed in these vehicles to ensure a safe and comfortable driving experience. Hundreds of thousands of miles of driving tests are required to achieve a well calibrated control system that is capable of operating an autonomous vehicle in an uncertain traffic environment where multiple interactions between vehicles and drivers simultaneously occur. Traffic simulators where these interactions can be modeled and represented with reasonable fidelity can help decrease the time and effort necessary for the development of the autonomous driving control algorithms by providing a venue where acceptable initial control calibrations can be achieved quickly and safely before actual road tests. In this paper, we present a game theoretic traffic model that can be used to 1) test and compare various autonomous vehicle decision and control systems and 2) calibrate the parameters of an existing control system. We demonstrate two example case studies, where, in the first case, we test and quantitatively compare two autonomous vehicle control systems in terms of their safety and performance, and, in the second case, we optimize the parameters of an autonomous vehicle control system, utilizing the proposed traffic model and simulation environment.