 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuery-aware Routing for Filtered Approximate Nearest Neighbors Search
Jun 18, 2026Filtered ANN search, which combines vector similarity with attribute predicates, is a core primitive in modern vector databases and retrieval-augmented generation. We benchmark all major categorical filtered ANN methods across multiple datasets under three predicates and find that no single method dominates. Moreover, even within a single dataset and predicate type, the best method for a query can vary. Therefore, we propose a query-aware routing framework. A lightweight ML model predicts each candidate method's recall on the query, and the router consults an offline benchmark table that maps every method and parameter setting to its measured recall and QPS, then selects the method with the best recall--QPS trade-off. Our ablation study narrows 22 candidate features to a minimal set of three and we adopt regression rather than classification as the prediction target to sharpen accuracy. Our model is trained on six real-world datasets and applied to five unseen validation datasets. The final result shows that our router achieves state-of-the-art recall and QPS balance across all five validation datasets compared to existing filtered ANN baselines, while incurring negligible latency overhead.
Explore Intrinsic Geometry for Query-based Tiny and Oriented Object Detector with Momentum-based Bipartite Matching
Feb 14, 2026Recent query-based detectors have achieved remarkable progress, yet their performance remains constrained when handling objects with arbitrary orientations, especially for tiny objects capturing limited texture information. This limitation primarily stems from the underutilization of intrinsic geometry during pixel-based feature decoding and the occurrence of inter-stage matching inconsistency caused by stage-wise bipartite matching. To tackle these challenges, we present IGOFormer, a novel query-based oriented object detector that explicitly integrates intrinsic geometry into feature decoding and enhances inter-stage matching stability. Specifically, we design an Intrinsic Geometry-aware Decoder, which enhances the object-related features conditioned on an object query by injecting complementary geometric embeddings extrapolated from their correlations to capture the geometric layout of the object, thereby offering a critical geometric insight into its orientation. Meanwhile, a Momentum-based Bipartite Matching scheme is developed to adaptively aggregate historical matching costs by formulating an exponential moving average with query-specific smoothing factors, effectively preventing conflicting supervisory signals arising from inter-stage matching inconsistency. Extensive experiments and ablation studies demonstrate the superiority of our IGOFormer for aerial oriented object detection, achieving an AP$_{50}$ score of 78.00\% on DOTA-V1.0 using Swin-T backbone under the single-scale setting. The code will be made publicly available.
On Infusing Reachability-Based Safety Assurance within Planning Frameworks for Human-Robot Vehicle Interactions
Dec 06, 2020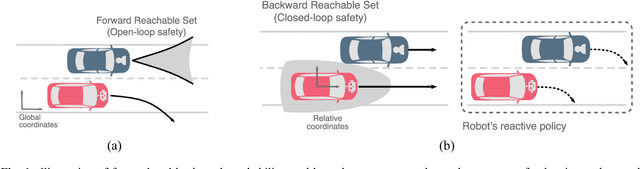

Action anticipation, intent prediction, and proactive behavior are all desirable characteristics for autonomous driving policies in interactive scenarios. Paramount, however, is ensuring safety on the road -- a key challenge in doing so is accounting for uncertainty in human driver actions without unduly impacting planner performance. This paper introduces a minimally-interventional safety controller operating within an autonomous vehicle control stack with the role of ensuring collision-free interaction with an externally controlled (e.g., human-driven) counterpart while respecting static obstacles such as a road boundary wall. We leverage reachability analysis to construct a real-time (100Hz) controller that serves the dual role of (i) tracking an input trajectory from a higher-level planning algorithm using model predictive control, and (ii) assuring safety by maintaining the availability of a collision-free escape maneuver as a persistent constraint regardless of whatever future actions the other car takes. A full-scale steer-by-wire platform is used to conduct traffic weaving experiments wherein two cars, initially side-by-side, must swap lanes in a limited amount of time and distance, emulating cars merging onto/off of a highway. We demonstrate that, with our control stack, the autonomous vehicle is able to avoid collision even when the other car defies the planner's expectations and takes dangerous actions, either carelessly or with the intent to collide, and otherwise deviates minimally from the planned trajectory to the extent required to maintain safety.
* arXiv admin note: text overlap with arXiv:1812.11315
Game-Theoretic Modeling of Driver and Vehicle Interactions for Verification and Validation of Autonomous Vehicle Control Systems
Aug 30, 2016
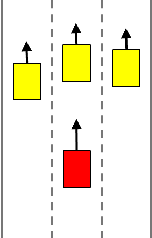
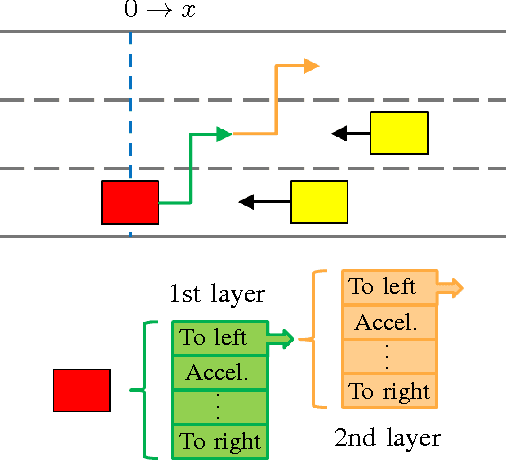
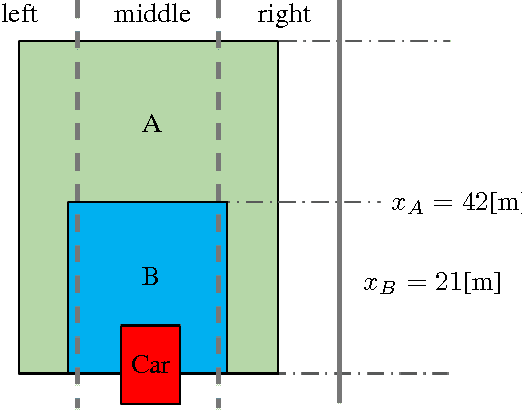
Autonomous driving has been the subject of increased interest in recent years both in industry and in academia. Serious efforts are being pursued to address legal, technical and logistical problems and make autonomous cars a viable option for everyday transportation. One significant challenge is the time and effort required for the verification and validation of the decision and control algorithms employed in these vehicles to ensure a safe and comfortable driving experience. Hundreds of thousands of miles of driving tests are required to achieve a well calibrated control system that is capable of operating an autonomous vehicle in an uncertain traffic environment where multiple interactions between vehicles and drivers simultaneously occur. Traffic simulators where these interactions can be modeled and represented with reasonable fidelity can help decrease the time and effort necessary for the development of the autonomous driving control algorithms by providing a venue where acceptable initial control calibrations can be achieved quickly and safely before actual road tests. In this paper, we present a game theoretic traffic model that can be used to 1) test and compare various autonomous vehicle decision and control systems and 2) calibrate the parameters of an existing control system. We demonstrate two example case studies, where, in the first case, we test and quantitatively compare two autonomous vehicle control systems in terms of their safety and performance, and, in the second case, we optimize the parameters of an autonomous vehicle control system, utilizing the proposed traffic model and simulation environment.