 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Fall Recovery for Armless Bipedal-Wheeled Robots Via Force-Guided Learning
Jun 12, 2026Fall recovery is critical for autonomous legged locomotion. Existing methods have demonstrated that some legged robots, such as humanoids and quadrupeds, are capable of fall recovery from diverse postures by utilizing arms or coordinating multi-legs to generate support forces. Without arms or other legs to provide supportive assistance, a bipedal-wheeled robot must rely solely on the actuation of its legs, making recovery particularly difficult. To address this, we introduce FTSR (Force-guided Teacher-student framework with Stage-wise Rewards). The force-guided method constructs an external auxiliary force during simulation training that correlates directly with the robot's real-time height, explicitly formulating this force as an optimizable constraint. Through constrained reinforcement learning, the policy is guided toward reducing force dependency gradually and increasing the body height, developing internal recovery strategies despite having no arms for support. Height-progressive stage-Wise rewards progressively structure posture stabilization during recovery and transition to sustained locomotion, integrated with teacher-student architecture distilling privileged knowledge of force effects and recovery dynamics. After simulation training, the policy is deployed on a physical armless bipedal-wheeled robot and extensively evaluated. Experiments confirm robust and reliable fall recovery under diverse challenging conditions, demonstrating strong environmental adaptability and motion robustness, while maintaining full post-recovery motion capability. The framework also generalizes effectively to a high-DOF humanoid, confirming its practical generalizability. The project page is available at https://2350575870.github.io/force-guided.github.io/
* 8 pages, 6 figures, accepted by IEEE Robotics and Automation Letters (RA-L)
Learning Symbolic Operators: A Neurosymbolic Solution for Autonomous Disassembly of Electric Vehicle Battery
Jun 07, 2022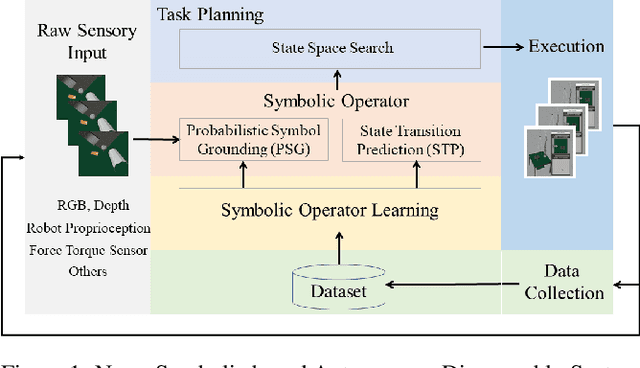
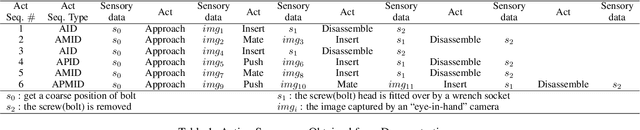
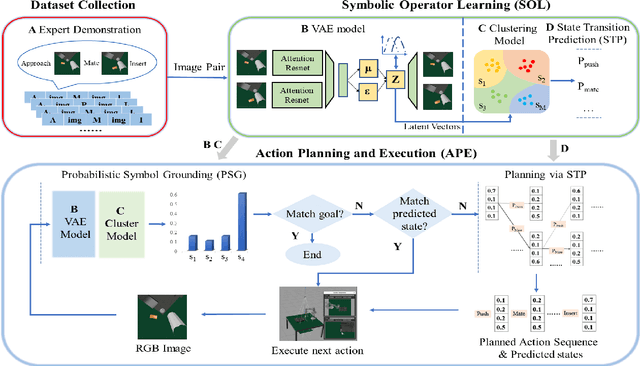
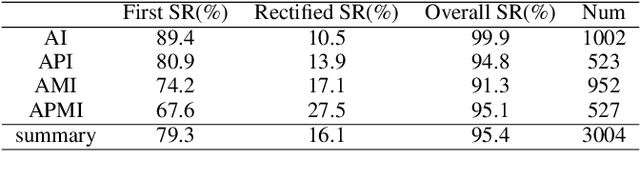
The booming of electric vehicles demands efficient battery disassembly for recycling to be environment-friendly. Currently, battery disassembly is still primarily done by humans, probably assisted by robots, due to the unstructured environment and high uncertainties. It is highly desirable to design autonomous solutions to improve work efficiency and lower human risks in high voltage and toxic environments. This paper proposes a novel neurosymbolic method, which augments the traditional Variational Autoencoder (VAE) model to learn symbolic operators based on raw sensory inputs and their relationships. The symbolic operators include a probabilistic state symbol grounding model and a state transition matrix for predicting states after each execution to enable autonomous task and motion planning. At last, the method's feasibility is verified through test results.
SeanNet: Semantic Understanding Network for Localization Under Object Dynamics
Oct 05, 2021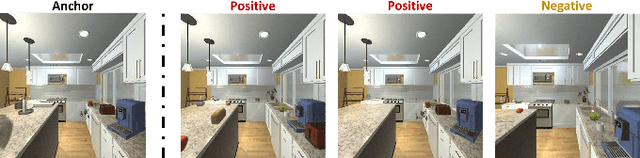
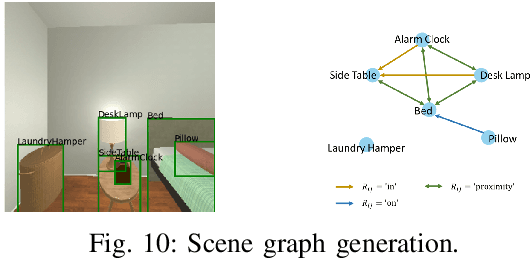
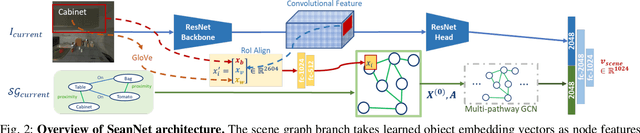

We aim for domestic robots to operate indoor for long-term service. Under the object-level scene dynamics induced by human daily activities, a robot needs to robustly localize itself in the environment subject to scene uncertainties. Previous works have addressed visual-based localization in static environments, yet the object-level scene dynamics challenge existing methods on long-term deployment of the robot. This paper proposes SEmantic understANding Network (SeanNet) that enables robots to measure the similarity between two scenes on both visual and semantic aspects. We further develop a similarity-based localization method based on SeanNet for monitoring the progress of visual navigation tasks. In our experiments, we benchmarked SeanNet against baselines methods on scene similarity measures, as well as visual navigation performance once integrated with a visual navigator. We demonstrate that SeanNet outperforms all baseline methods, by robustly localizing the robot under object dynamics, thus reliably informing visual navigation about the task status.