 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeanNet: Semantic Understanding Network for Localization Under Object Dynamics
Paper and Code
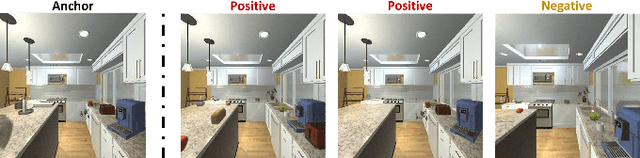

We aim for domestic robots to operate indoor for long-term service. Under the object-level scene dynamics induced by human daily activities, a robot needs to robustly localize itself in the environment subject to scene uncertainties. Previous works have addressed visual-based localization in static environments, yet the object-level scene dynamics challenge existing methods on long-term deployment of the robot. This paper proposes SEmantic understANding Network (SeanNet) that enables robots to measure the similarity between two scenes on both visual and semantic aspects. We further develop a similarity-based localization method based on SeanNet for monitoring the progress of visual navigation tasks. In our experiments, we benchmarked SeanNet against baselines methods on scene similarity measures, as well as visual navigation performance once integrated with a visual navigator. We demonstrate that SeanNet outperforms all baseline methods, by robustly localizing the robot under object dynamics, thus reliably informing visual navigation about the task status.