 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUGNA-VPR: A Novel Training Paradigm for Visual Place Recognition Based on Uncertainty-Guided NeRF Augmentation
Mar 27, 2025
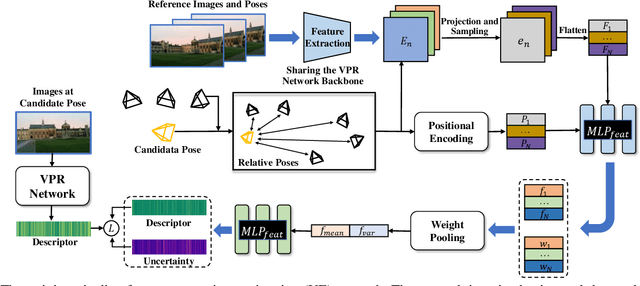
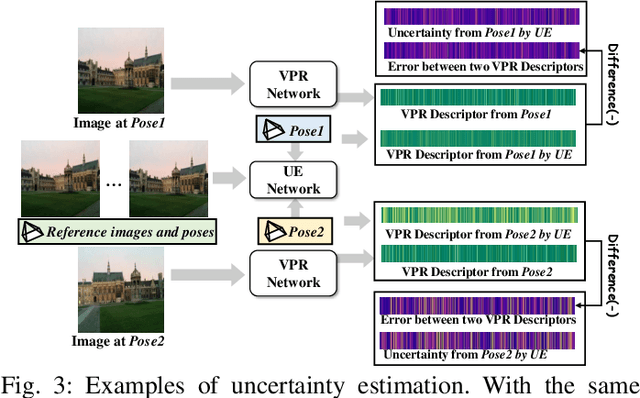
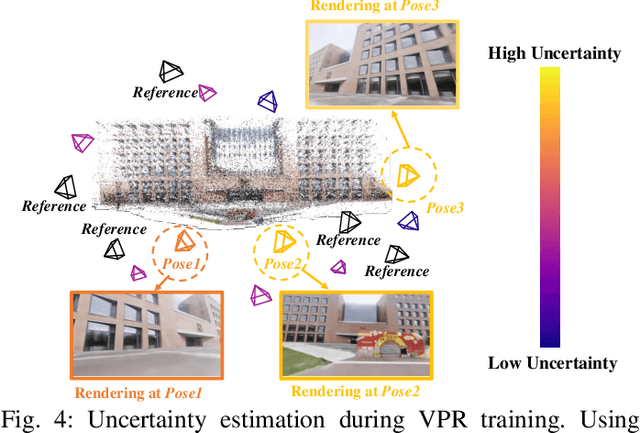
Visual place recognition (VPR) is crucial for robots to identify previously visited locations, playing an important role in autonomous navigation in both indoor and outdoor environments. However, most existing VPR datasets are limited to single-viewpoint scenarios, leading to reduced recognition accuracy, particularly in multi-directional driving or feature-sparse scenes. Moreover, obtaining additional data to mitigate these limitations is often expensive. This paper introduces a novel training paradigm to improve the performance of existing VPR networks by enhancing multi-view diversity within current datasets through uncertainty estimation and NeRF-based data augmentation. Specifically, we initially train NeRF using the existing VPR dataset. Then, our devised self-supervised uncertainty estimation network identifies places with high uncertainty. The poses of these uncertain places are input into NeRF to generate new synthetic observations for further training of VPR networks. Additionally, we propose an improved storage method for efficient organization of augmented and original training data. We conducted extensive experiments on three datasets and tested three different VPR backbone networks. The results demonstrate that our proposed training paradigm significantly improves VPR performance by fully utilizing existing data, outperforming other training approaches. We further validated the effectiveness of our approach on self-recorded indoor and outdoor datasets, consistently demonstrating superior results. Our dataset and code have been released at \href{https://github.com/nubot-nudt/UGNA-VPR}{https://github.com/nubot-nudt/UGNA-VPR}.
ResLPR: A LiDAR Data Restoration Network and Benchmark for Robust Place Recognition Against Weather Corruptions
Mar 16, 2025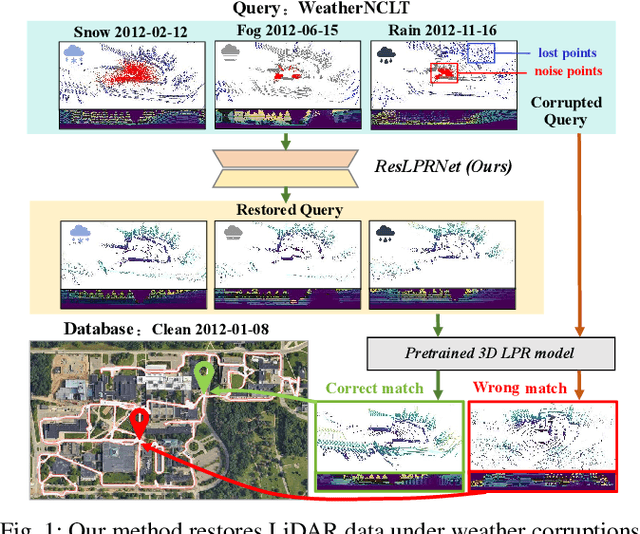
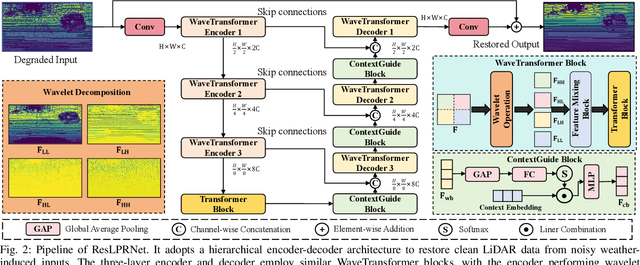
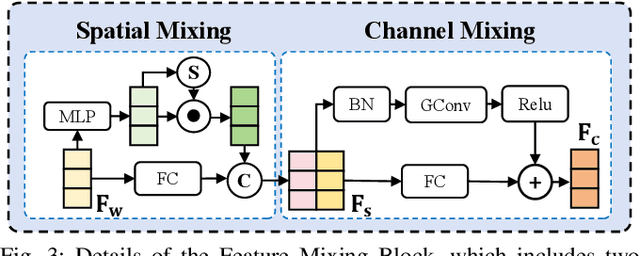
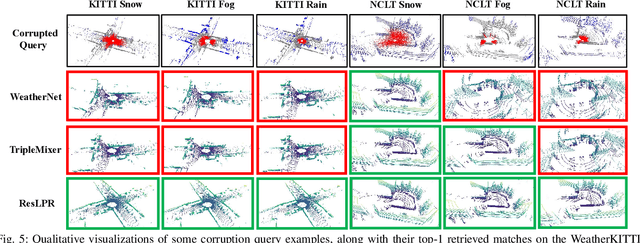
LiDAR-based place recognition (LPR) is a key component for autonomous driving, and its resilience to environmental corruption is critical for safety in high-stakes applications. While state-of-the-art (SOTA) LPR methods perform well in clean weather, they still struggle with weather-induced corruption commonly encountered in driving scenarios. To tackle this, we propose ResLPRNet, a novel LiDAR data restoration network that largely enhances LPR performance under adverse weather by restoring corrupted LiDAR scans using a wavelet transform-based network. ResLPRNet is efficient, lightweight and can be integrated plug-and-play with pretrained LPR models without substantial additional computational cost. Given the lack of LPR datasets under adverse weather, we introduce ResLPR, a novel benchmark that examines SOTA LPR methods under a wide range of LiDAR distortions induced by severe snow, fog, and rain conditions. Experiments on our proposed WeatherKITTI and WeatherNCLT datasets demonstrate the resilience and notable gains achieved by using our restoration method with multiple LPR approaches in challenging weather scenarios. Our code and benchmark are publicly available here: https://github.com/nubot-nudt/ResLPR.
TSCM: A Teacher-Student Model for Vision Place Recognition Using Cross-Metric Knowledge Distillation
Apr 02, 2024



Visual place recognition (VPR) plays a pivotal role in autonomous exploration and navigation of mobile robots within complex outdoor environments. While cost-effective and easily deployed, camera sensors are sensitive to lighting and weather changes, and even slight image alterations can greatly affect VPR efficiency and precision. Existing methods overcome this by exploiting powerful yet large networks, leading to significant consumption of computational resources. In this paper, we propose a high-performance teacher and lightweight student distillation framework called TSCM. It exploits our devised cross-metric knowledge distillation to narrow the performance gap between the teacher and student models, maintaining superior performance while enabling minimal computational load during deployment. We conduct comprehensive evaluations on large-scale datasets, namely Pittsburgh30k and Pittsburgh250k. Experimental results demonstrate the superiority of our method over baseline models in terms of recognition accuracy and model parameter efficiency. Moreover, our ablation studies show that the proposed knowledge distillation technique surpasses other counterparts. The code of our method has been released at https://github.com/nubot-nudt/TSCM.