 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration of Conservative Dynamical Systems Based on Stiffness Encoding
Nov 02, 2024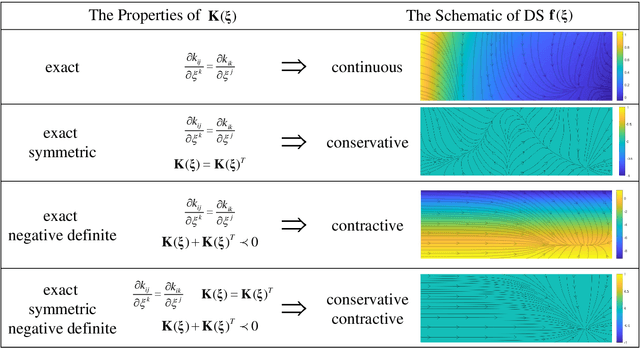
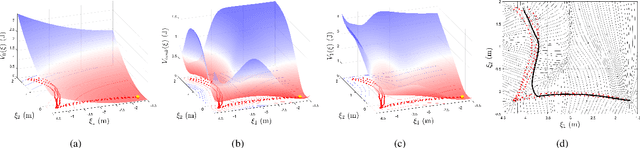
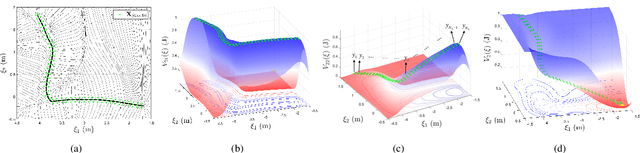
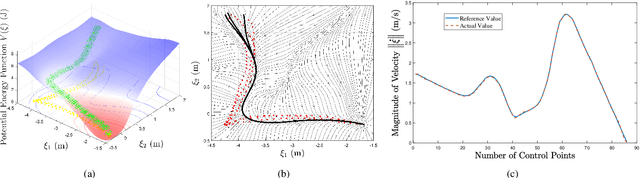
Dynamical systems (DSs) provide a framework for high flexibility, robustness, and control reliability and are widely used in motion planning and physical human-robot interaction. The properties of the DS directly determine the robot's specific motion patterns and the performance of the closed-loop control system. In this paper, we establish a quantitative relationship between stiffness properties and DS. We propose a stiffness encoding framework to modulate DS properties by embedding specific stiffnesses. In particular, from the perspective of the closed-loop control system's passivity, a conservative DS is learned by encoding a conservative stiffness. The generated DS has a symmetric attraction behavior and a variable stiffness profile. The proposed method is applicable to demonstration trajectories belonging to different manifolds and types (e.g., closed and self-intersecting trajectories), and the closed-loop control system is always guaranteed to be passive in different cases. For controllers tracking the general DS, the passivity of the system needs to be guaranteed by the energy tank. We further propose a generic vector field decomposition strategy based on conservative stiffness, which effectively slows down the decay rate of energy in the energy tank and improves the stability margin of the control system. Finally, a series of simulations in various scenarios and experiments on planar and curved motion tasks demonstrate the validity of our theory and methodology.
DA-PFL: Dynamic Affinity Aggregation for Personalized Federated Learning
Mar 14, 2024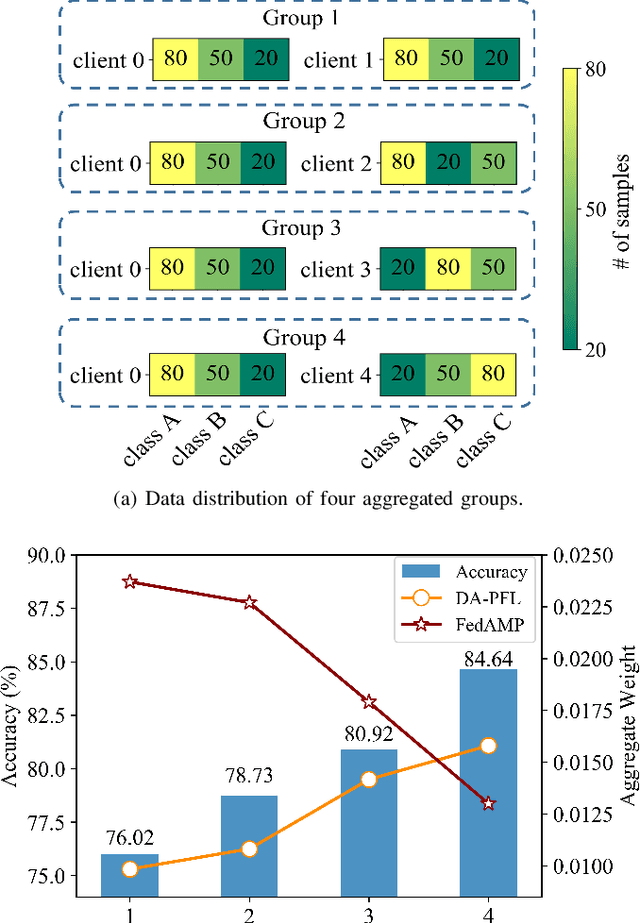
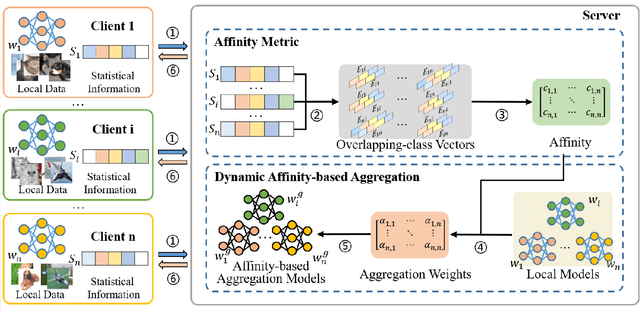
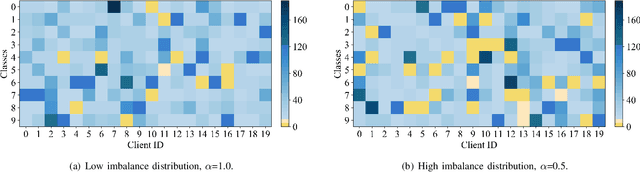
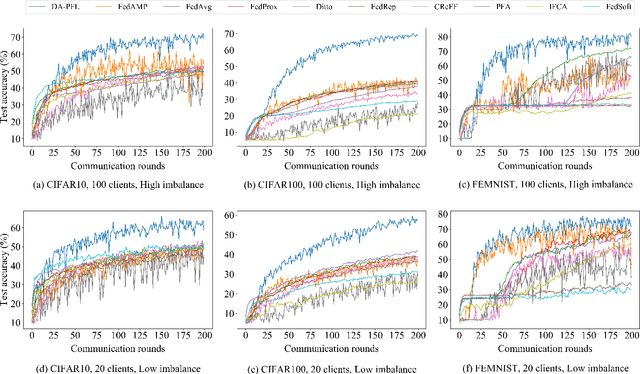
Personalized federated learning becomes a hot research topic that can learn a personalized learning model for each client. Existing personalized federated learning models prefer to aggregate similar clients with similar data distribution to improve the performance of learning models. However, similaritybased personalized federated learning methods may exacerbate the class imbalanced problem. In this paper, we propose a novel Dynamic Affinity-based Personalized Federated Learning model (DA-PFL) to alleviate the class imbalanced problem during federated learning. Specifically, we build an affinity metric from a complementary perspective to guide which clients should be aggregated. Then we design a dynamic aggregation strategy to dynamically aggregate clients based on the affinity metric in each round to reduce the class imbalanced risk. Extensive experiments show that the proposed DA-PFL model can significantly improve the accuracy of each client in three real-world datasets with state-of-the-art comparison methods.
Awesome-META+: Meta-Learning Research and Learning Platform
Apr 24, 2023

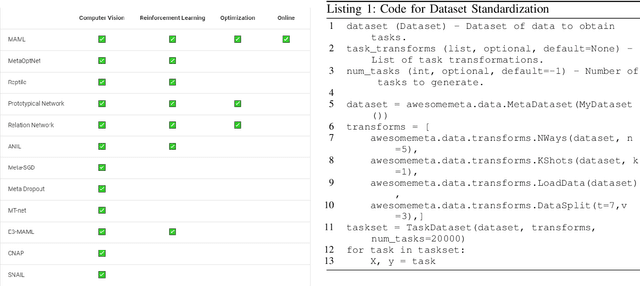
Artificial intelligence technology has already had a profound impact in various fields such as economy, industry, and education, but still limited. Meta-learning, also known as "learning to learn", provides an opportunity for general artificial intelligence, which can break through the current AI bottleneck. However, meta learning started late and there are fewer projects compare with CV, NLP etc. Each deployment requires a lot of experience to configure the environment, debug code or even rewrite, and the frameworks are isolated. Moreover, there are currently few platforms that focus exclusively on meta-learning, or provide learning materials for novices, for which the threshold is relatively high. Based on this, Awesome-META+, a meta-learning framework integration and learning platform is proposed to solve the above problems and provide a complete and reliable meta-learning framework application and learning platform. The project aims to promote the development of meta-learning and the expansion of the community, including but not limited to the following functions: 1) Complete and reliable meta-learning framework, which can adapt to multi-field tasks such as target detection, image classification, and reinforcement learning. 2) Convenient and simple model deployment scheme which provide convenient meta-learning transfer methods and usage methods to lower the threshold of meta-learning and improve efficiency. 3) Comprehensive researches for learning. 4) Objective and credible performance analysis and thinking.