 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePILD: Physics-Informed Learning via Diffusion
Jan 29, 2026Diffusion models have emerged as powerful generative tools for modeling complex data distributions, yet their purely data-driven nature limits applicability in practical engineering and scientific problems where physical laws need to be followed. This paper proposes Physics-Informed Learning via Diffusion (PILD), a framework that unifies diffusion modeling and first-principles physical constraints by introducing a virtual residual observation sampled from a Laplace distribution to supervise generation during training. To further integrate physical laws, a conditional embedding module is incorporated to inject physical information into the denoising network at multiple layers, ensuring consistent guidance throughout the diffusion process. The proposed PILD framework is concise, modular, and broadly applicable to problems governed by ordinary differential equations, partial differential equations, as well as algebraic equations or inequality constraints. Extensive experiments across engineering and scientific tasks including estimating vehicle trajectories, tire forces, Darcy flow and plasma dynamics, demonstrate that our PILD substantially improves accuracy, stability, and generalization over existing physics-informed and diffusion-based baselines.
A reproducible approach to merging behavior analysis based on High Definition Map
Mar 21, 2023Existing research on merging behavior generally prioritize the application of various algorithms, but often overlooks the fine-grained process and analysis of trajectories. This leads to the neglect of surrounding vehicle matching, the opaqueness of indicators definition, and reproducible crisis. To address these gaps, this paper presents a reproducible approach to merging behavior analysis. Specifically, we outline the causes of subjectivity and irreproducibility in existing studies. Thereafter, we employ lanelet2 High Definition (HD) map to construct a reproducible framework, that minimizes subjectivities, defines standardized indicators, identifies alongside vehicles, and divides scenarios. A comparative macroscopic and microscopic analysis is subsequently conducted. More importantly, this paper adheres to the Reproducible Research concept, providing all the source codes and reproduction instructions. Our results demonstrate that although scenarios with alongside vehicles occur in less than 6% of cases, their characteristics are significantly different from others, and these scenarios are often accompanied by high risk. This paper refines the understanding of merging behavior, raises awareness of reproducible studies, and serves as a watershed moment.
Analysis of lane-change conflict between cars and trucks at merging section using UAV video data
Jan 05, 2022The freeway on-ramp merging section is often identified as a crash-prone spot due to the high frequency of traffic conflicts. Very few traffic conflict analysis studies comprehensively consider different vehicle types at freeway merging section. Thus, the main objective of this study is to analyse conflicts between different vehicle types at freeway merging section. Field data are collected by Unmanned Aerial Vehicle (UAV) at merging areas in Shanghai, China. Vehicle extraction method is utilized to obtain vehicle trajectories. Time-to-collision (TTC) is utilized as the surrogate safety measure. TTC of car-car conflicts are the smallest while TTC of truck-truck conflicts are the largest. Traffic conflicts frequently occur at on-ramp and acceleration lane. Results show the spatial distribution of lane-change conflicts is significantly different between different vehicle types, suggesting that vehicle drivers should maintain safe distance especially car drivers. Besides, in order to decrease lane-change conflict at merging area, traffic management agencies are suggested to change dotted lie to solid lane at the beginning of acceleration lane.
Understanding the merging behavior patterns and evolutionary mechanism at freeway on-ramps
Jul 31, 2021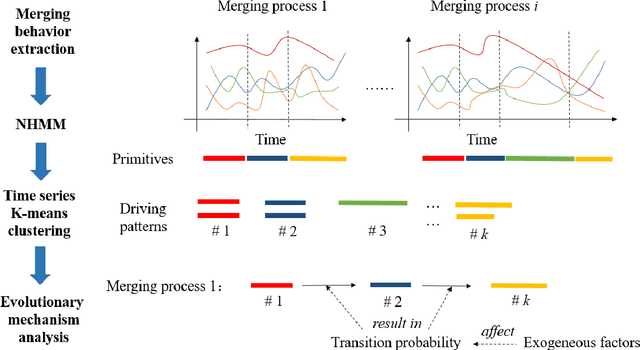
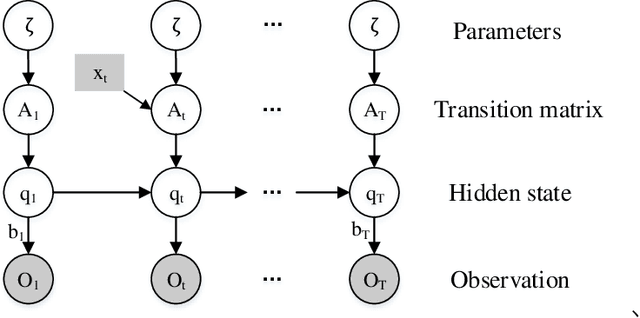


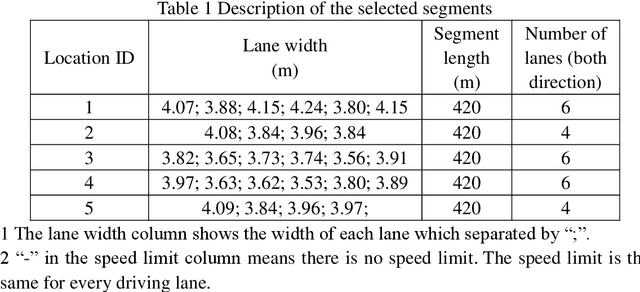
Understanding the merging behavior patterns at freeway on-ramps is important for assistanting the decisions of autonomous driving. This study develops a primitive-based framework to identify the driving patterns during merging processes and reveal the evolutionary mechanism at freeway on-ramps in congested traffic flow. The Nonhomogeneous Hidden Markov Model is introduced to decompose the merging processes into primitives containing semantic information. Then, the time-series K-means clustering is utilized to gather these primitives with variable-length time series into interpretable merging behavior patterns. Different from traditional state segmentation methods (e.g. Hidden Markov Model), the model proposed in this study considers the dependence of transition probability on exogenous variables, thereby revealing the influence of covariates on the evolution of driving patterns. This approach is evaluated in the merging area at a freeway on-ramp using the INTERACTION dataset. Results demonstrate that the approach provides an insight about the complicated merging processes. The findings about interpretable merging behavior patterns as well as the evolutionary mechanism can be used to design and improve the merging decision-making for autonomous vehicles.
V2V Spatiotemporal Interactive Pattern Recognition and Risk Analysis in Lane Changes
May 22, 2021
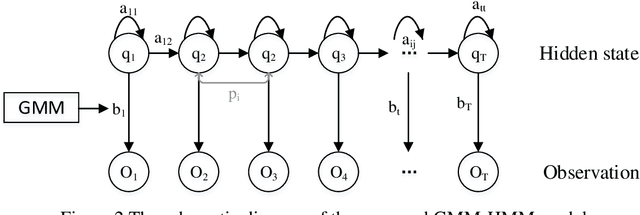

In complex lane change (LC) scenarios, semantic interpretation and safety analysis of dynamic interactive pattern are necessary for autonomous vehicles to make appropriate decisions. This study proposes an unsupervised learning framework that combines primitive-based interactive pattern recognition methods and risk analysis methods. The Hidden Markov Model with the Gaussian mixture model (GMM-HMM) approach is developed to decompose the LC scenarios into primitives. Then the Dynamic Time Warping (DTW) distance based K-means clustering is applied to gather the primitives to 13 types of interactive patterns. Finally, this study considers two types of time-to-collision (TTC) involved in the LC process as indicators to analyze the risk of the interactive patterns and extract high-risk LC interactive patterns. The results obtained from The Highway Drone Dataset (highD) demonstrate that the identified LC interactive patterns contain interpretable semantic information. This study explores the spatiotemporal evolution law and risk formation mechanism of the LC interactive patterns and the findings are useful for comprehensively understanding the latent interactive patterns, improving the rationality and safety of autonomous vehicle's decision-making.
A Lane-Changing Prediction Method Based on Temporal Convolution Network
Nov 01, 2020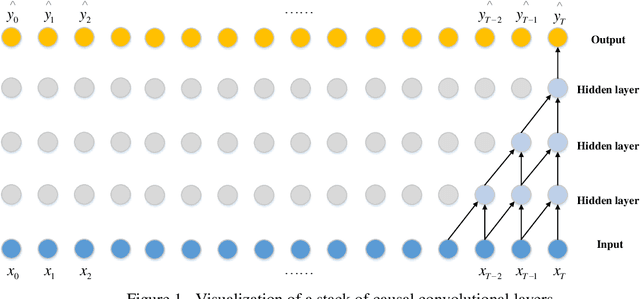
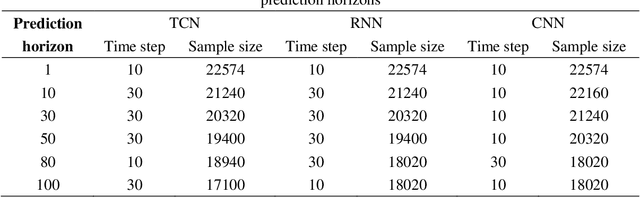
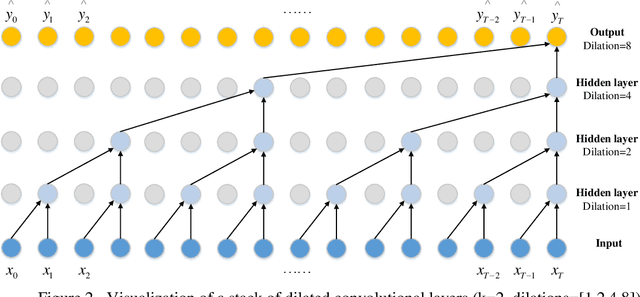
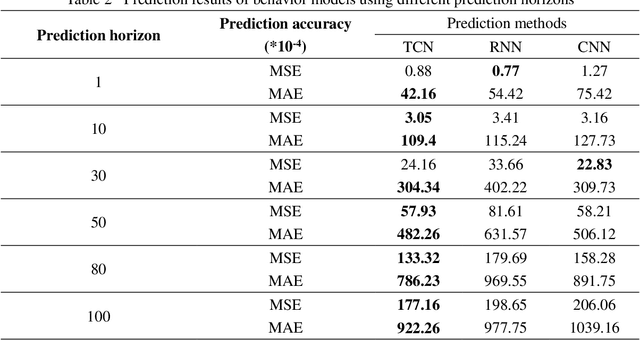
Lane-changing is an important driving behavior and unreasonable lane changes can result in potentially dangerous traffic collisions. Advanced Driver Assistance System (ADAS) can assist drivers to change lanes safely and efficiently. To capture the stochastic time series of lane-changing behavior, this study proposes a temporal convolutional network (TCN) to predict the long-term lane-changing trajectory and behavior. In addition, the convolutional neural network (CNN) and recurrent neural network (RNN) methods are considered as the benchmark models to demonstrate the learning ability of the TCN. The lane-changing dataset was collected by the driving simulator. The prediction performance of TCN is demonstrated from three aspects: different input variables, different input dimensions and different driving scenarios. Prediction results show that the TCN can accurately predict the long-term lane-changing trajectory and driving behavior with shorter computational time compared with two benchmark models. The TCN can provide accurate lane-changing prediction, which is one key information for the development of accurate ADAS.