 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lane-Changing Prediction Method Based on Temporal Convolution Network
Nov 01, 2020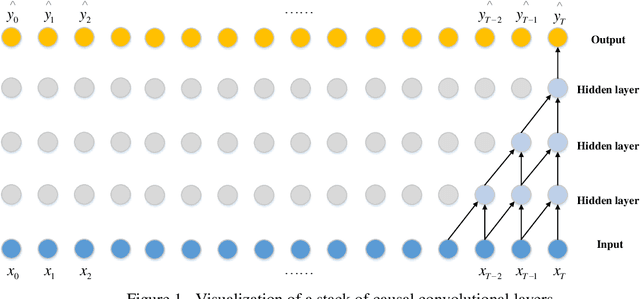
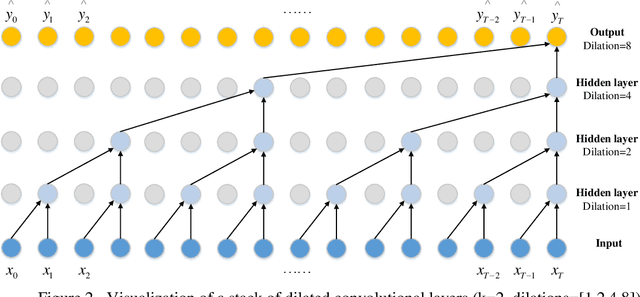
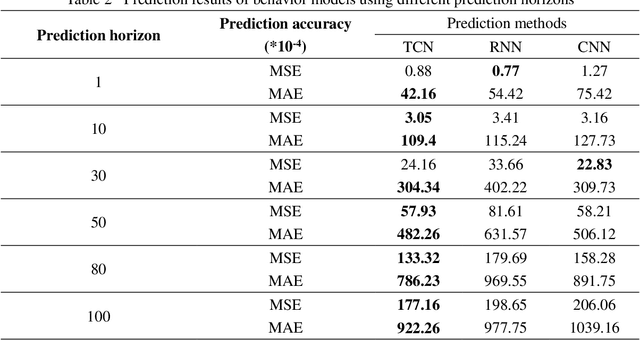
Lane-changing is an important driving behavior and unreasonable lane changes can result in potentially dangerous traffic collisions. Advanced Driver Assistance System (ADAS) can assist drivers to change lanes safely and efficiently. To capture the stochastic time series of lane-changing behavior, this study proposes a temporal convolutional network (TCN) to predict the long-term lane-changing trajectory and behavior. In addition, the convolutional neural network (CNN) and recurrent neural network (RNN) methods are considered as the benchmark models to demonstrate the learning ability of the TCN. The lane-changing dataset was collected by the driving simulator. The prediction performance of TCN is demonstrated from three aspects: different input variables, different input dimensions and different driving scenarios. Prediction results show that the TCN can accurately predict the long-term lane-changing trajectory and driving behavior with shorter computational time compared with two benchmark models. The TCN can provide accurate lane-changing prediction, which is one key information for the development of accurate ADAS.