 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA reproducible approach to merging behavior analysis based on High Definition Map
Mar 21, 2023Existing research on merging behavior generally prioritize the application of various algorithms, but often overlooks the fine-grained process and analysis of trajectories. This leads to the neglect of surrounding vehicle matching, the opaqueness of indicators definition, and reproducible crisis. To address these gaps, this paper presents a reproducible approach to merging behavior analysis. Specifically, we outline the causes of subjectivity and irreproducibility in existing studies. Thereafter, we employ lanelet2 High Definition (HD) map to construct a reproducible framework, that minimizes subjectivities, defines standardized indicators, identifies alongside vehicles, and divides scenarios. A comparative macroscopic and microscopic analysis is subsequently conducted. More importantly, this paper adheres to the Reproducible Research concept, providing all the source codes and reproduction instructions. Our results demonstrate that although scenarios with alongside vehicles occur in less than 6% of cases, their characteristics are significantly different from others, and these scenarios are often accompanied by high risk. This paper refines the understanding of merging behavior, raises awareness of reproducible studies, and serves as a watershed moment.
Pareto-optimal fronts to diminish lane-changing impact in mixed traffic
Sep 17, 2021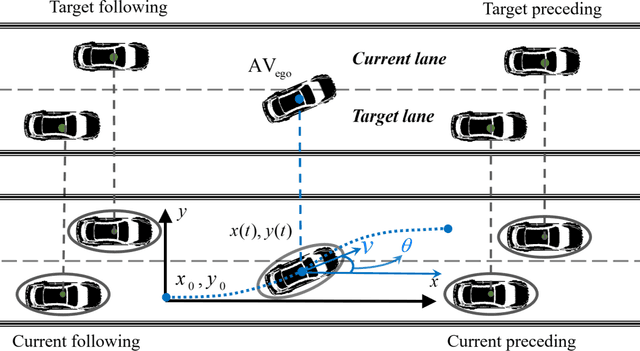
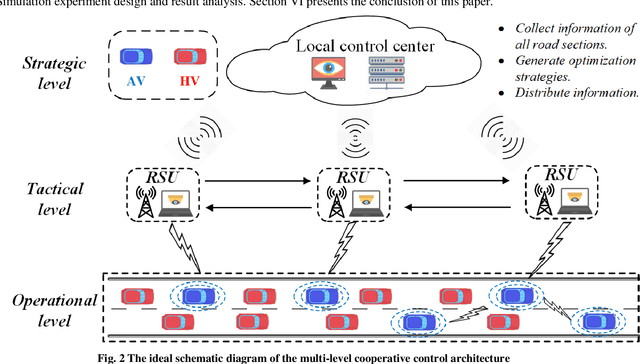
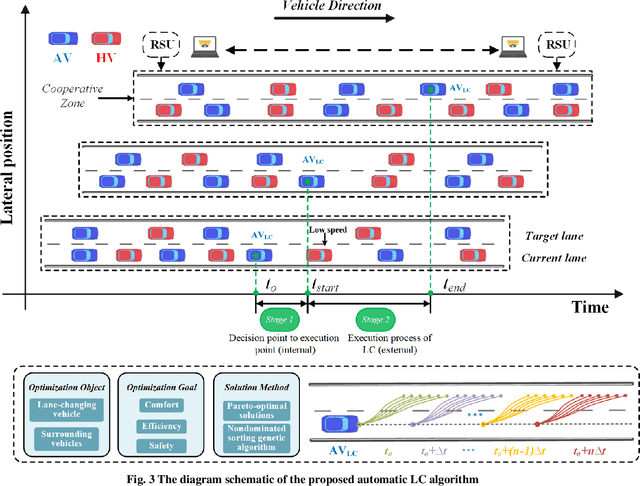
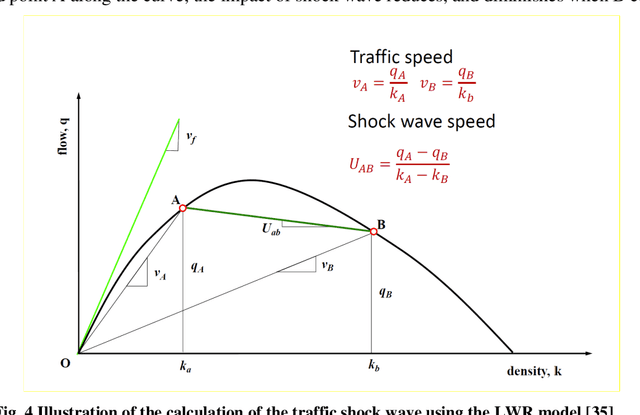
In order to minimize the impact of LC (lane-changing) maneuver, this research proposes a novel LC algorithm in mixed traffic. The LC maneuver is decomposed into two stages: one is from the decision point to the execution point (finding a suitable gap), and the other is from the execution point to the end point (performing the LC maneuver). Thereafter, a multiobjective optimization problem integrating these two stages is posed, in which the comfort, efficiency and safety of the LC vehicle and the surrounding vehicles are simultaneously considered. Through introducing the NSGA-II (Non-dominated Sorting Genetic Algorithm), the pareto-optimal front of this problem is obtained. The nearest point of the frontier to the origin is used as the final solution. Through the micro-level analysis of the operating status of each vehicle, macro-level analysis of the traffic flow state within the LC area, and the sensitivity analysis of pareto-optimal fronts, we verify the performance of our proposed algorithm. Our results demonstrate that compared with the existing algorithm, our algorithm provides the optimal execution point and trajectory with the least impact on surrounding vehicles. The operation status of the traffic flow within the LC area has been significantly improved. This research could provide valuable insights into autonomous driving technology.
Exploration of lane-changing duration for heavy vehicles and passenger cars: a survival analysis approach
Aug 08, 2021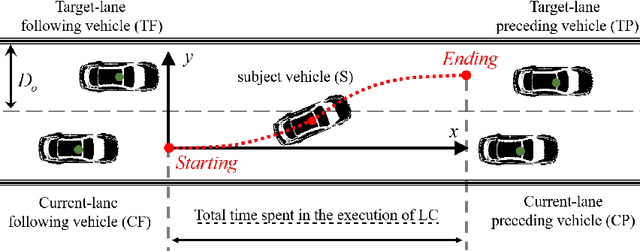
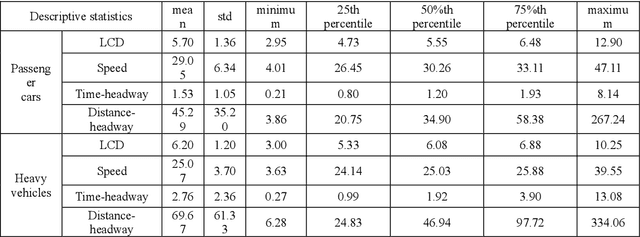
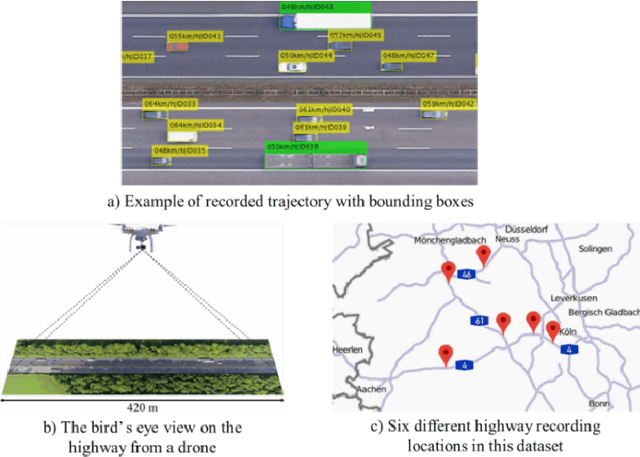
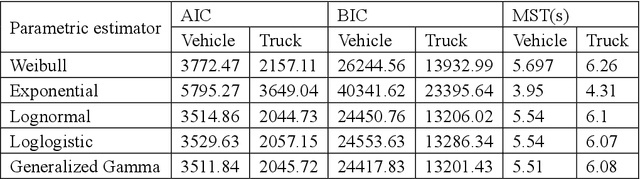
Lane-changing (LC) behavior describes the lateral movement of the vehicle from the current-lane to the target-lane while proceeding forward. Among the many research directions, LC duration (LCD) measures the total time it takes for a vehicle to travel from the current lane to the target lane, which is an indispensable indicator to characterize the LC behavior. Although existing research has made some achievements, less attention has been paid to the research of heavy vehicles' LCD. Therefore, this paper aims to further explore the LCD between heavy vehicles and passenger cars. LC trajectories are extracted from the newly-released HighD dataset, which contains of 16.5 hours of measurement and over 11,000 vehicles. The survival function of LCD has been estimated, and the characteristic has been analyzed. Thereafter, the Accelerated Failure Time model is introduced to explore the influencing factors. Results demonstrate that the MST value of passenger cars and heavy vehicles is about 5.51s and 6.08s. The heavy vehicles would maintain a longer time-headway and distance-headway with preceding vehicle when performing LC. Nevertheless, these two factors do not significantly affect the LCD of heavy vehicles. Finally, the results and the modeling implications have been discussed. We hope this paper could contribute to our further understanding of the LC behaviors for heavy vehicles and passenger cars.
Hierarchical automatic lane-changing motion planning: from self-optimum to local-optimum
Aug 08, 2021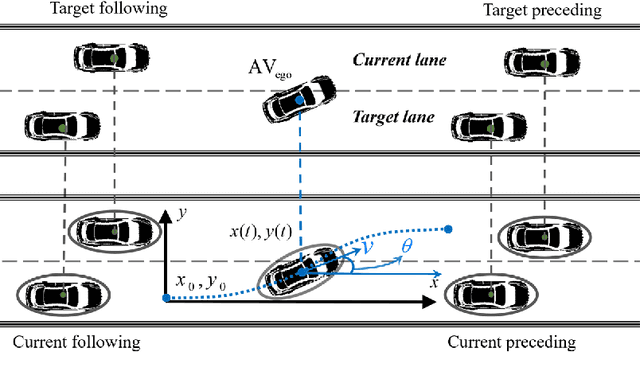
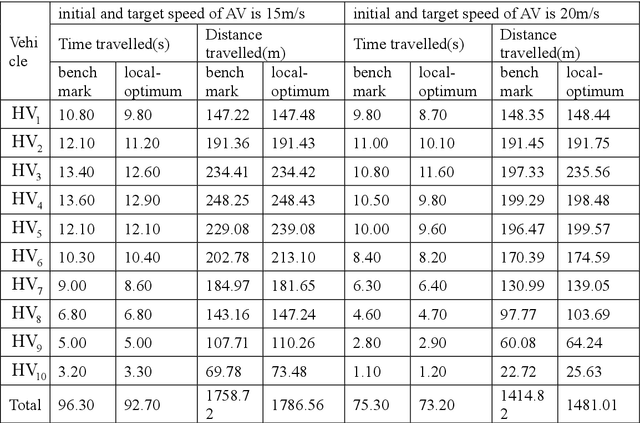
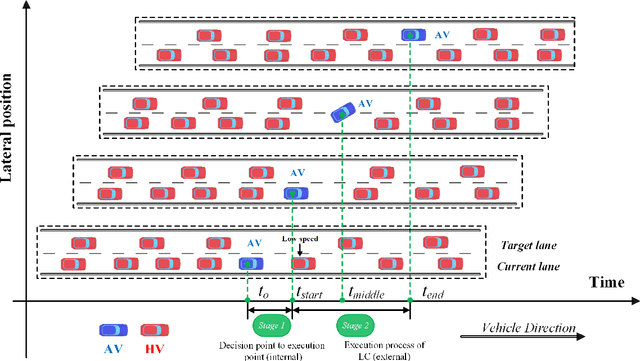
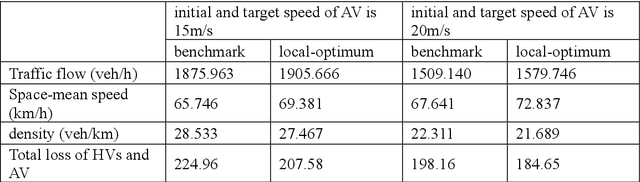
In order to minimize the impact of lane change (LC) maneuver on surrounding traffic environment, a hierarchical automatic LC algorithm that could realize local optimum has been proposed. This algorithm consists of a tactical layer planner and an operational layer controller. The former generates a local-optimum trajectory. The comfort, efficiency, and safety of the LC vehicle and its surrounding vehicles are simultaneously satisfied in the optimization objective function. The later is designed based on vehicle kinematics model and the Model Predictive Control (MPC), which aims to minimize the tracking error and control increment. Combining macro-level and micro-level analysis, we verify the effectiveness of the proposed algorithm. Our results demonstrate that our proposed algorithm could greatly reduce the impact of LC maneuver on traffic flow. This is reflected in the decrease of total loss for nearby vehicles (such as discomfort and speed reduction), and the increase of traffic speed and throughput within the LC area. In addition, in order to guide the practical application of our algorithm, we employ the HighD dataset to validate the algorithm. This research could also be regarded as a preliminary foundational work to develop locally-optimal automatic LC algorithm. We anticipate that this research could provide valuable insights into autonomous driving technology.