 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePareto-optimal fronts to diminish lane-changing impact in mixed traffic
Paper and Code
Sep 17, 2021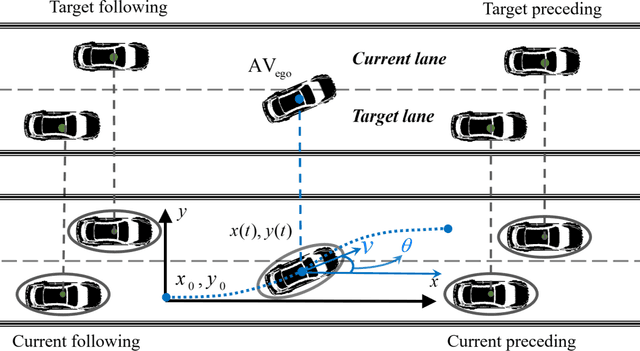
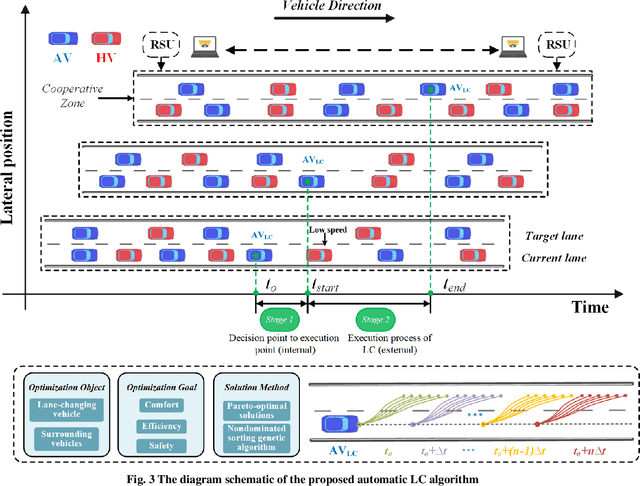
In order to minimize the impact of LC (lane-changing) maneuver, this research proposes a novel LC algorithm in mixed traffic. The LC maneuver is decomposed into two stages: one is from the decision point to the execution point (finding a suitable gap), and the other is from the execution point to the end point (performing the LC maneuver). Thereafter, a multiobjective optimization problem integrating these two stages is posed, in which the comfort, efficiency and safety of the LC vehicle and the surrounding vehicles are simultaneously considered. Through introducing the NSGA-II (Non-dominated Sorting Genetic Algorithm), the pareto-optimal front of this problem is obtained. The nearest point of the frontier to the origin is used as the final solution. Through the micro-level analysis of the operating status of each vehicle, macro-level analysis of the traffic flow state within the LC area, and the sensitivity analysis of pareto-optimal fronts, we verify the performance of our proposed algorithm. Our results demonstrate that compared with the existing algorithm, our algorithm provides the optimal execution point and trajectory with the least impact on surrounding vehicles. The operation status of the traffic flow within the LC area has been significantly improved. This research could provide valuable insights into autonomous driving technology.