 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploration of lane-changing duration for heavy vehicles and passenger cars: a survival analysis approach
Paper and Code
Aug 08, 2021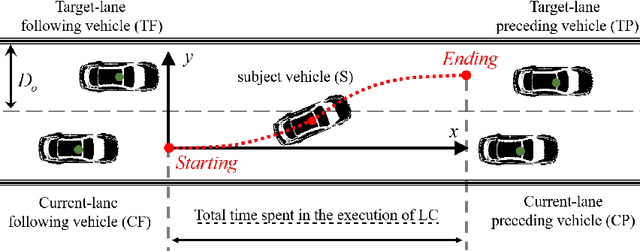
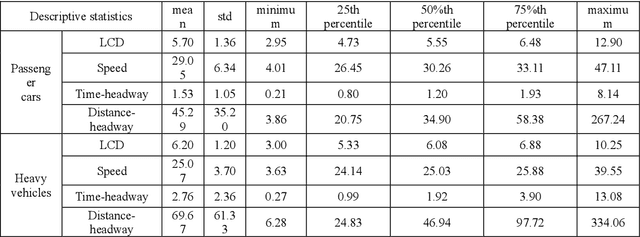
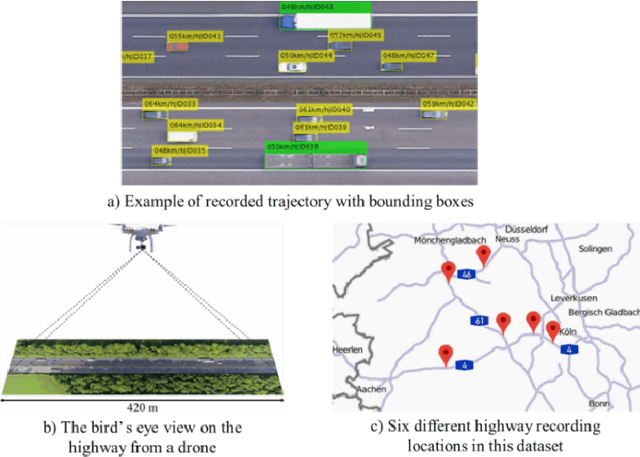
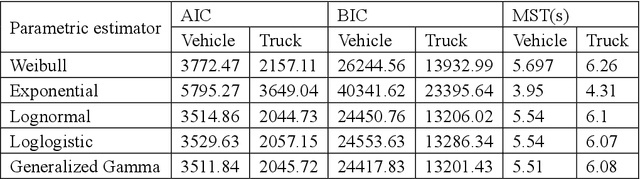
Lane-changing (LC) behavior describes the lateral movement of the vehicle from the current-lane to the target-lane while proceeding forward. Among the many research directions, LC duration (LCD) measures the total time it takes for a vehicle to travel from the current lane to the target lane, which is an indispensable indicator to characterize the LC behavior. Although existing research has made some achievements, less attention has been paid to the research of heavy vehicles' LCD. Therefore, this paper aims to further explore the LCD between heavy vehicles and passenger cars. LC trajectories are extracted from the newly-released HighD dataset, which contains of 16.5 hours of measurement and over 11,000 vehicles. The survival function of LCD has been estimated, and the characteristic has been analyzed. Thereafter, the Accelerated Failure Time model is introduced to explore the influencing factors. Results demonstrate that the MST value of passenger cars and heavy vehicles is about 5.51s and 6.08s. The heavy vehicles would maintain a longer time-headway and distance-headway with preceding vehicle when performing LC. Nevertheless, these two factors do not significantly affect the LCD of heavy vehicles. Finally, the results and the modeling implications have been discussed. We hope this paper could contribute to our further understanding of the LC behaviors for heavy vehicles and passenger cars.