 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical automatic lane-changing motion planning: from self-optimum to local-optimum
Aug 08, 2021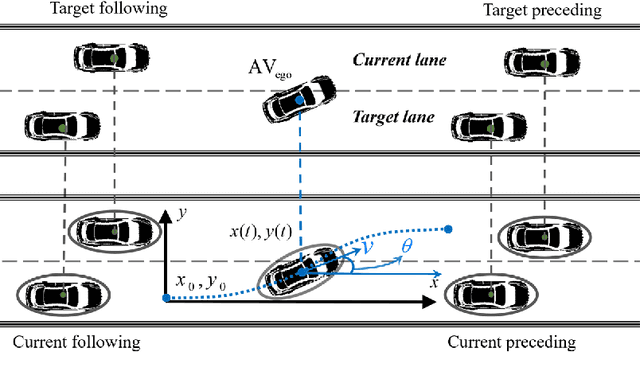
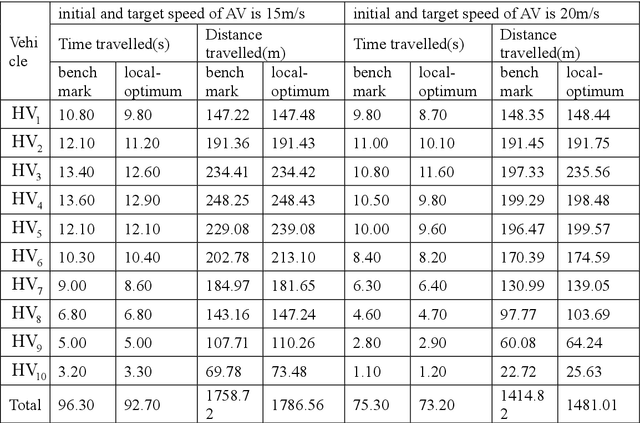
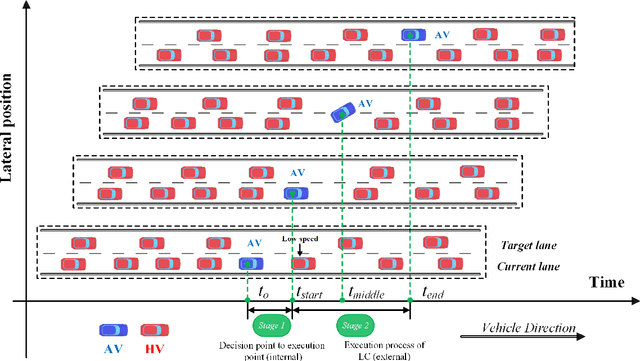
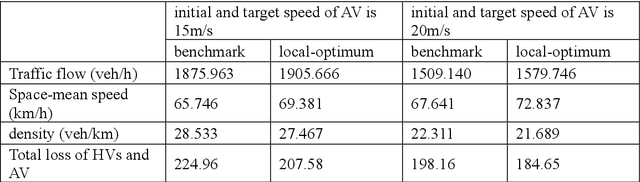
In order to minimize the impact of lane change (LC) maneuver on surrounding traffic environment, a hierarchical automatic LC algorithm that could realize local optimum has been proposed. This algorithm consists of a tactical layer planner and an operational layer controller. The former generates a local-optimum trajectory. The comfort, efficiency, and safety of the LC vehicle and its surrounding vehicles are simultaneously satisfied in the optimization objective function. The later is designed based on vehicle kinematics model and the Model Predictive Control (MPC), which aims to minimize the tracking error and control increment. Combining macro-level and micro-level analysis, we verify the effectiveness of the proposed algorithm. Our results demonstrate that our proposed algorithm could greatly reduce the impact of LC maneuver on traffic flow. This is reflected in the decrease of total loss for nearby vehicles (such as discomfort and speed reduction), and the increase of traffic speed and throughput within the LC area. In addition, in order to guide the practical application of our algorithm, we employ the HighD dataset to validate the algorithm. This research could also be regarded as a preliminary foundational work to develop locally-optimal automatic LC algorithm. We anticipate that this research could provide valuable insights into autonomous driving technology.