 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2V Spatiotemporal Interactive Pattern Recognition and Risk Analysis in Lane Changes
Paper and Code
May 22, 2021
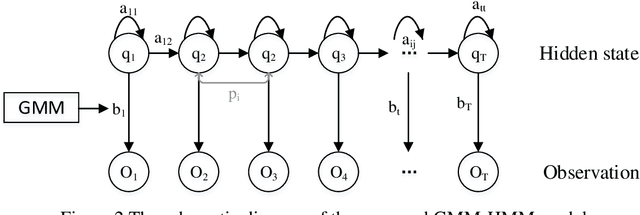

In complex lane change (LC) scenarios, semantic interpretation and safety analysis of dynamic interactive pattern are necessary for autonomous vehicles to make appropriate decisions. This study proposes an unsupervised learning framework that combines primitive-based interactive pattern recognition methods and risk analysis methods. The Hidden Markov Model with the Gaussian mixture model (GMM-HMM) approach is developed to decompose the LC scenarios into primitives. Then the Dynamic Time Warping (DTW) distance based K-means clustering is applied to gather the primitives to 13 types of interactive patterns. Finally, this study considers two types of time-to-collision (TTC) involved in the LC process as indicators to analyze the risk of the interactive patterns and extract high-risk LC interactive patterns. The results obtained from The Highway Drone Dataset (highD) demonstrate that the identified LC interactive patterns contain interpretable semantic information. This study explores the spatiotemporal evolution law and risk formation mechanism of the LC interactive patterns and the findings are useful for comprehensively understanding the latent interactive patterns, improving the rationality and safety of autonomous vehicle's decision-making.