 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVector Quantized Latent Concepts: A Scalable Alternative to Clustering-Based Concept Discovery
Feb 02, 2026Deep Learning models encode rich semantic information in their hidden representations. However, it remains challenging to understand which parts of this information models actually rely on when making predictions. A promising line of post-hoc concept-based explanation methods relies on clustering token representations. However, commonly used approaches such as hierarchical clustering are computationally infeasible for large-scale datasets, and K-Means often yields shallow or frequency-dominated clusters. We propose the vector quantized latent concept (VQLC) method, a framework built upon the vector quantized-variational autoencoder (VQ-VAE) architecture that learns a discrete codebook mapping continuous representations to concept vectors. We perform thorough evaluations and show that VQLC improves scalability while maintaining comparable quality of human-understandable explanations.
Latent Concept-based Explanation of NLP Models
Apr 18, 2024


Interpreting and understanding the predictions made by deep learning models poses a formidable challenge due to their inherently opaque nature. Many previous efforts aimed at explaining these predictions rely on input features, specifically, the words within NLP models. However, such explanations are often less informative due to the discrete nature of these words and their lack of contextual verbosity. To address this limitation, we introduce the Latent Concept Attribution method (LACOAT), which generates explanations for predictions based on latent concepts. Our founding intuition is that a word can exhibit multiple facets, contingent upon the context in which it is used. Therefore, given a word in context, the latent space derived from our training process reflects a specific facet of that word. LACOAT functions by mapping the representations of salient input words into the training latent space, allowing it to provide predictions with context-based explanations within this latent space.
Long-form evaluation of model editing
Feb 14, 2024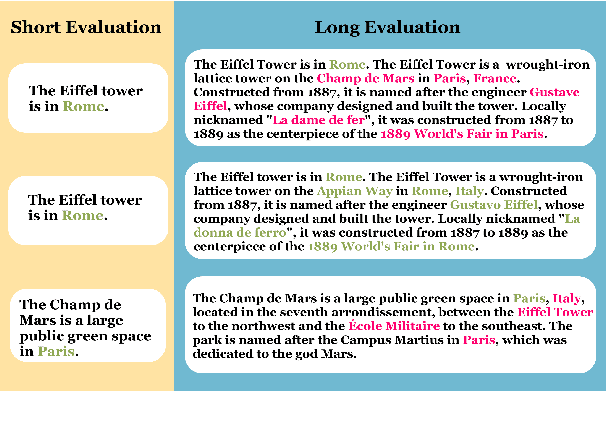
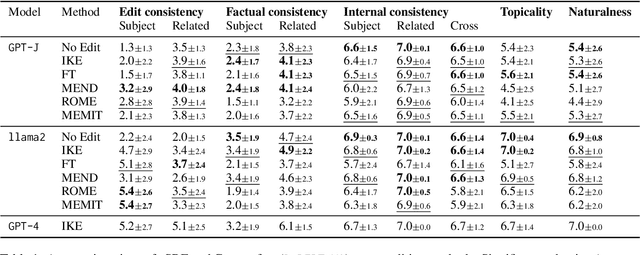
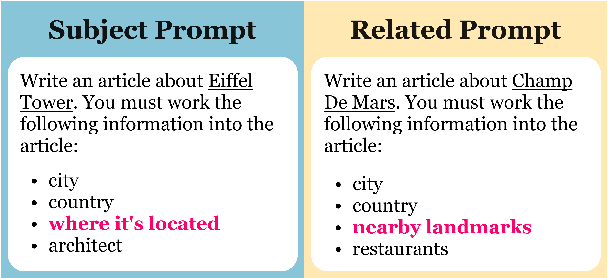
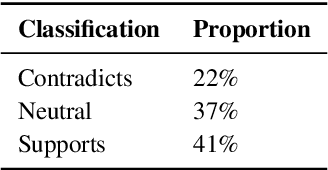
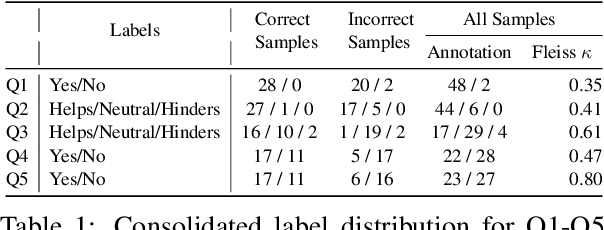
Evaluations of model editing currently only use the `next few token' completions after a prompt. As a result, the impact of these methods on longer natural language generation is largely unknown. We introduce long-form evaluation of model editing (\textbf{\textit{LEME}}) a novel evaluation protocol that measures the efficacy and impact of model editing in long-form generative settings. Our protocol consists of a machine-rated survey and a classifier which correlates well with human ratings. Importantly, we find that our protocol has very little relationship with previous short-form metrics (despite being designed to extend efficacy, generalization, locality, and portability into a long-form setting), indicating that our method introduces a novel set of dimensions for understanding model editing methods. Using this protocol, we benchmark a number of model editing techniques and present several findings including that, while some methods (ROME and MEMIT) perform well in making consistent edits within a limited scope, they suffer much more from factual drift than other methods. Finally, we present a qualitative analysis that illustrates common failure modes in long-form generative settings including internal consistency, lexical cohesion, and locality issues.
Design and Implementation of Global Path Planning System for Unmanned Surface Vehicle among Multiple Task Points
Jul 21, 2018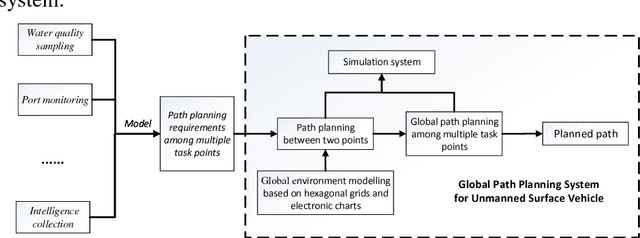
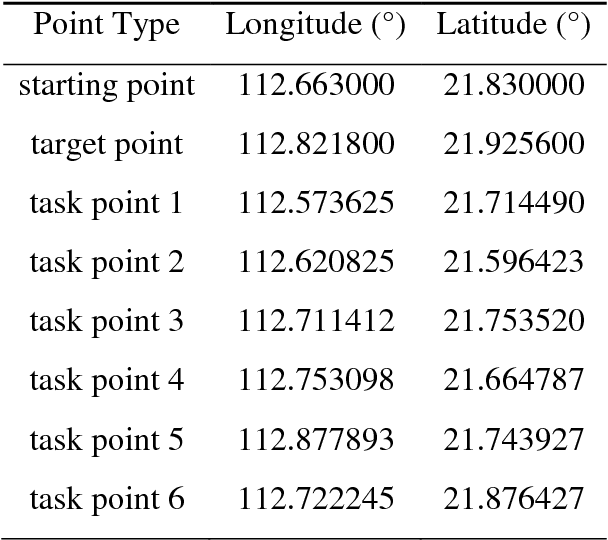
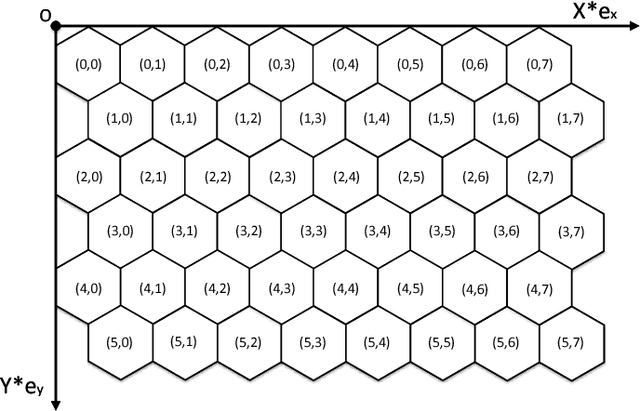

Global path planning is the key technology in the design of unmanned surface vehicles. This paper establishes global environment modelling based on electronic charts and hexagonal grids which are proved to be better than square grids in validity, safety and rapidity. Besides, we introduce Cube coordinate system to simplify hexagonal algorithms. Furthermore, we propose an improved A* algorithm to realize the path planning between two points. Based on that, we build the global path planning modelling for multiple task points and present an improved ant colony optimization to realize it accurately. The simulation results show that the global path planning system can plan an optimal path to tour multiple task points safely and quickly, which is superior to traditional methods in safety, rapidity and path length. Besides, the planned path can directly apply to actual applications of USVs.
* 28 pages, 15 figures
Research and Implementation of Global Path Planning for Unmanned Surface Vehicle Based on Electronic Chart
Feb 09, 2018
Unmanned Surface Vehicle (USV) is a new type of intelligent surface craft, and global path planning is the key technology of USV research, which can reflect the intelligent level of USV. In order to solve the problem of global path planning of USV, this paper proposes an improved A* algorithm for sailing cost optimization based on electronic charts. This paper uses the S-57 electronic chart to realize the establishment of the octree grid environment model, and proposes an improved A* algorithm based on sailing safety weight, pilot quantity and path curve smoothing to ensure the safety of the route, reduce the planning time, and improve path smoothness. The simulation results show that the environmental model construction method and the improved A* algorithm can generate safe and reasonable global path.
* 7 pages, 3 figures, conference