 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Stochastic Proximal Gradient Descent with Variance Reduction over Time-varying Networks
Jan 23, 2022
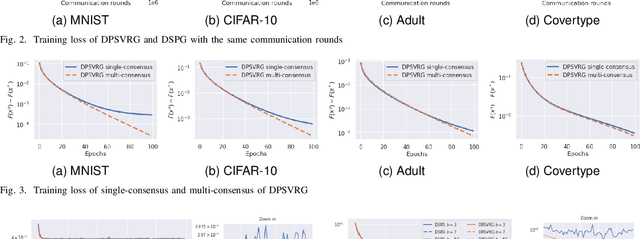

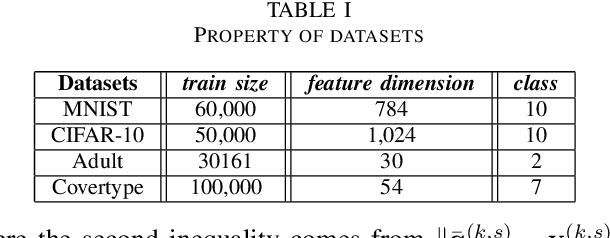
In decentralized learning, a network of nodes cooperate to minimize an overall objective function that is usually the finite-sum of their local objectives, and incorporates a non-smooth regularization term for the better generalization ability. Decentralized stochastic proximal gradient (DSPG) method is commonly used to train this type of learning models, while the convergence rate is retarded by the variance of stochastic gradients. In this paper, we propose a novel algorithm, namely DPSVRG, to accelerate the decentralized training by leveraging the variance reduction technique. The basic idea is to introduce an estimator in each node, which tracks the local full gradient periodically, to correct the stochastic gradient at each iteration. By transforming our decentralized algorithm into a centralized inexact proximal gradient algorithm with variance reduction, and controlling the bounds of error sequences, we prove that DPSVRG converges at the rate of $O(1/T)$ for general convex objectives plus a non-smooth term with $T$ as the number of iterations, while DSPG converges at the rate $O(\frac{1}{\sqrt{T}})$. Our experiments on different applications, network topologies and learning models demonstrate that DPSVRG converges much faster than DSPG, and the loss function of DPSVRG decreases smoothly along with the training epochs.
Toward Packet Routing with Fully-distributed Multi-agent Deep Reinforcement Learning
May 09, 2019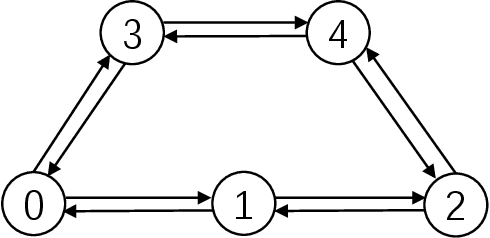
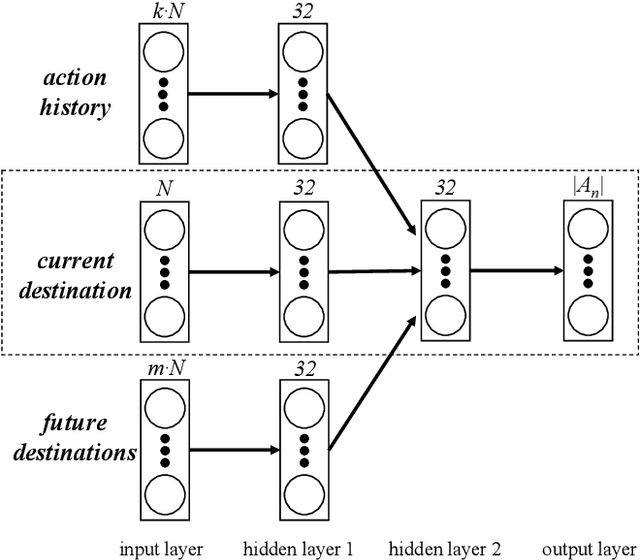
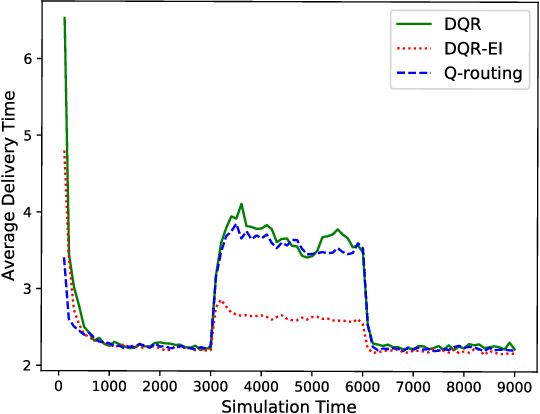
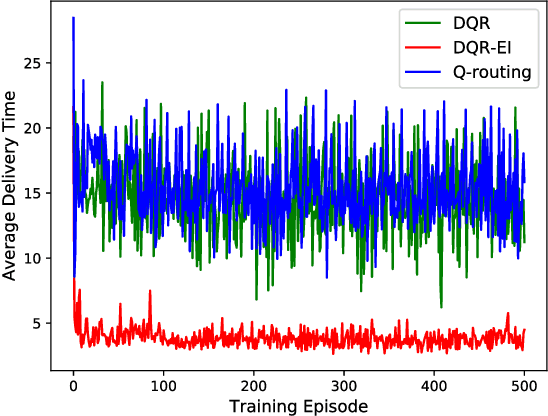
Packet routing is one of the fundamental problems in computer networks in which a router determines the next-hop of each packet in the queue to get it as quickly as possible to its destination. Reinforcement learning has been introduced to design the autonomous packet routing policy namely Q-routing only using local information available to each router. However, the curse of dimensionality of Q-routing prohibits the more comprehensive representation of dynamic network states, thus limiting the potential benefit of reinforcement learning. Inspired by recent success of deep reinforcement learning (DRL), we embed deep neural networks in multi-agent Q-routing. Each router possesses an independent neural network that is trained without communicating with its neighbors and makes decision locally. Two multi-agent DRL-enabled routing algorithms are proposed: one simply replaces Q-table of vanilla Q-routing by a deep neural network, and the other further employs extra information including the past actions and the destinations of non-head of line packets. Our simulation manifests that the direct substitution of Q-table by a deep neural network may not yield minimal delivery delays because the neural network does not learn more from the same input. When more information is utilized, adaptive routing policy can converge and significantly reduce the packet delivery time.
* 8 pages, 9 figures