 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEyeWorld: A Generative World Model of Ocular State and Dynamics
Mar 14, 2026Ophthalmic decision-making depends on subtle lesion-scale cues interpreted across multimodal imaging and over time, yet most medical foundation models remain static and degrade under modality and acquisition shifts. Here we introduce EyeWorld, a generative world model that conceptualizes the eye as a partially observed dynamical system grounded in clinical imaging. EyeWorld learns an observation-stable latent ocular state shared across modalities, unifying fine-grained parsing, structure-preserving cross-modality translation and quality-robust enhancement within a single framework. Longitudinal supervision further enables time-conditioned state transitions, supporting forecasting of clinically meaningful progression while preserving stable anatomy. By moving from static representation learning to explicit dynamical modeling, EyeWorld provides a unified approach to robust multimodal interpretation and prognosis-oriented simulation in medicine.
FFA Sora, video generation as fundus fluorescein angiography simulator
Dec 23, 2024



Fundus fluorescein angiography (FFA) is critical for diagnosing retinal vascular diseases, but beginners often struggle with image interpretation. This study develops FFA Sora, a text-to-video model that converts FFA reports into dynamic videos via a Wavelet-Flow Variational Autoencoder (WF-VAE) and a diffusion transformer (DiT). Trained on an anonymized dataset, FFA Sora accurately simulates disease features from the input text, as confirmed by objective metrics: Frechet Video Distance (FVD) = 329.78, Learned Perceptual Image Patch Similarity (LPIPS) = 0.48, and Visual-question-answering Score (VQAScore) = 0.61. Specific evaluations showed acceptable alignment between the generated videos and textual prompts, with BERTScore of 0.35. Additionally, the model demonstrated strong privacy-preserving performance in retrieval evaluations, achieving an average Recall@K of 0.073. Human assessments indicated satisfactory visual quality, with an average score of 1.570(scale: 1 = best, 5 = worst). This model addresses privacy concerns associated with sharing large-scale FFA data and enhances medical education.
Adaptive Control Strategy for Quadruped Robots in Actuator Degradation Scenarios
Dec 29, 2023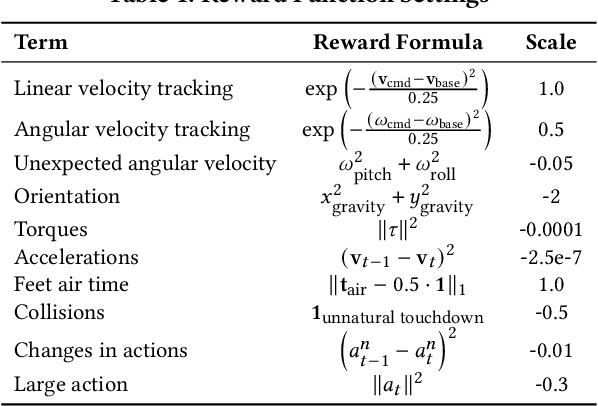
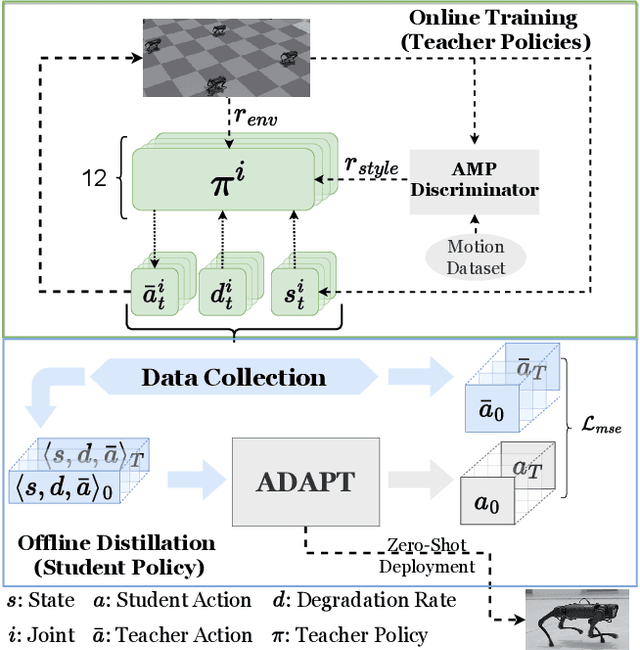
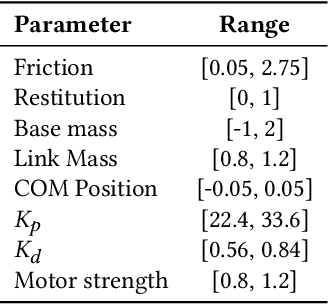
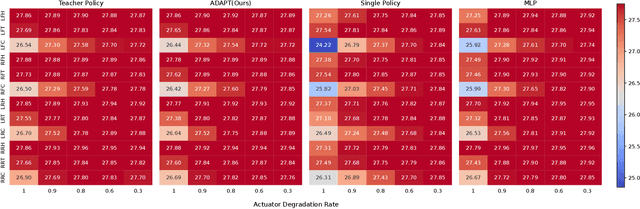
Quadruped robots have strong adaptability to extreme environments but may also experience faults. Once these faults occur, robots must be repaired before returning to the task, reducing their practical feasibility. One prevalent concern among these faults is actuator degradation, stemming from factors like device aging or unexpected operational events. Traditionally, addressing this problem has relied heavily on intricate fault-tolerant design, which demands deep domain expertise from developers and lacks generalizability. Learning-based approaches offer effective ways to mitigate these limitations, but a research gap exists in effectively deploying such methods on real-world quadruped robots. This paper introduces a pioneering teacher-student framework rooted in reinforcement learning, named Actuator Degradation Adaptation Transformer (ADAPT), aimed at addressing this research gap. This framework produces a unified control strategy, enabling the robot to sustain its locomotion and perform tasks despite sudden joint actuator faults, relying exclusively on its internal sensors. Empirical evaluations on the Unitree A1 platform validate the deployability and effectiveness of Adapt on real-world quadruped robots, and affirm the robustness and practicality of our approach.
Aerial IRS with Robotic Anchoring Capabilities: A Novel Way for Adaptive Coverage Enhancement
Nov 15, 2023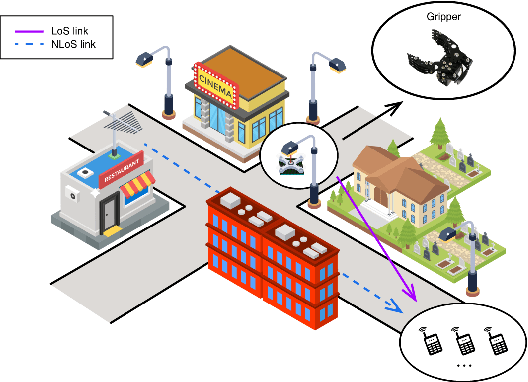
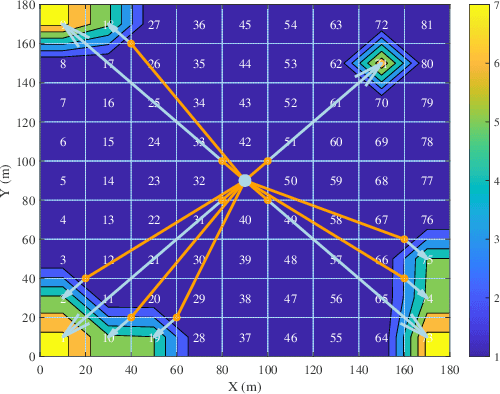
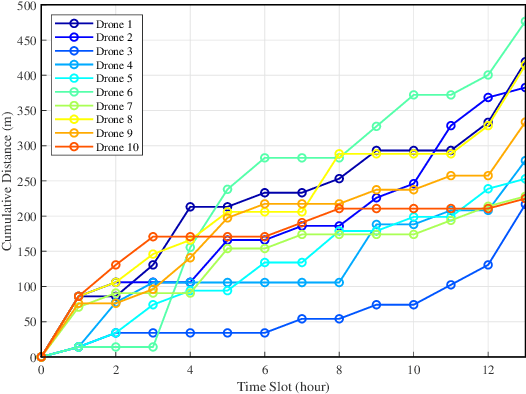
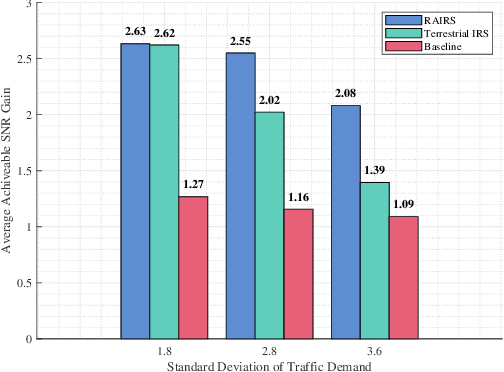
It is widely accepted that integrating intelligent reflecting surfaces (IRSs) with unmanned aerial vehicles (UAV) or drones can assist wireless networks in improving network coverage and end user Quality of Service (QoS). However, the critical constrain of drones is their very limited hovering/flying time. In this paper we propose the concept of robotic aerial IRSs (RA-IRSs), which are in essence drones that in addition to IRS embed an anchoring mechanism that allows them to grasp in an energy neutral manner at tall urban landforms such as lampposts. By doing so, RA-IRSs can completely eliminate the flying/hovering energy consumption and can offer service for multiple hours or even days (something not possible with UAV-mounted IRSs). Using that property we show how RA-IRS can increase network performance by changing their anchoring location to follow the spatio-temporal traffic demand. The proposed methodology, developed through Integer Linear Programming (ILP) formulations offers a significant Signal-to-Noise (SNR) gain in highly heterogeneous regions in terms of traffic demand compared to fixed IRS; hence, addressing urban coverage discrepancies effectively. Numerical simulations validate the superiority of RA-IRSs over fixed terrestrial IRSs in terms of traffic serviceability, sustaining more than 2 times the traffic demand in areas experiencing high heterogeneity, emphasizing their adaptability in improving coverage and QoS in complex urban terrains.