 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial IRS with Robotic Anchoring Capabilities: A Novel Way for Adaptive Coverage Enhancement
Nov 15, 2023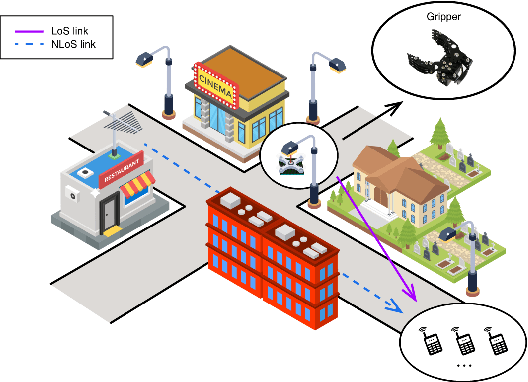
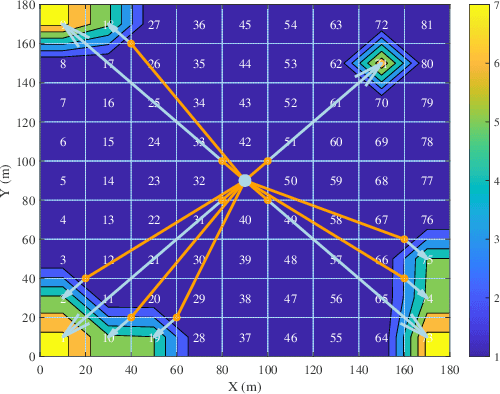
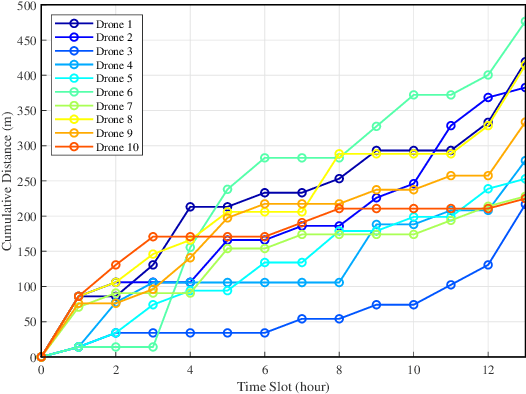
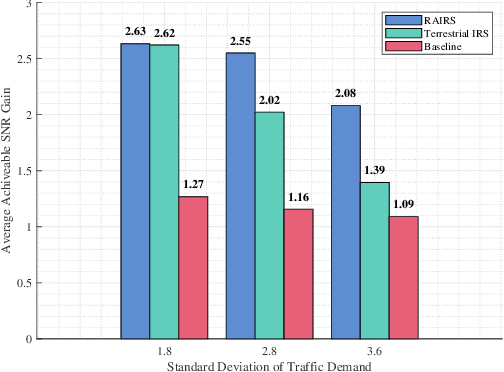
It is widely accepted that integrating intelligent reflecting surfaces (IRSs) with unmanned aerial vehicles (UAV) or drones can assist wireless networks in improving network coverage and end user Quality of Service (QoS). However, the critical constrain of drones is their very limited hovering/flying time. In this paper we propose the concept of robotic aerial IRSs (RA-IRSs), which are in essence drones that in addition to IRS embed an anchoring mechanism that allows them to grasp in an energy neutral manner at tall urban landforms such as lampposts. By doing so, RA-IRSs can completely eliminate the flying/hovering energy consumption and can offer service for multiple hours or even days (something not possible with UAV-mounted IRSs). Using that property we show how RA-IRS can increase network performance by changing their anchoring location to follow the spatio-temporal traffic demand. The proposed methodology, developed through Integer Linear Programming (ILP) formulations offers a significant Signal-to-Noise (SNR) gain in highly heterogeneous regions in terms of traffic demand compared to fixed IRS; hence, addressing urban coverage discrepancies effectively. Numerical simulations validate the superiority of RA-IRSs over fixed terrestrial IRSs in terms of traffic serviceability, sustaining more than 2 times the traffic demand in areas experiencing high heterogeneity, emphasizing their adaptability in improving coverage and QoS in complex urban terrains.
Multi-Objective Provisioning of Network Slices using Deep Reinforcement Learning
Aug 14, 2022

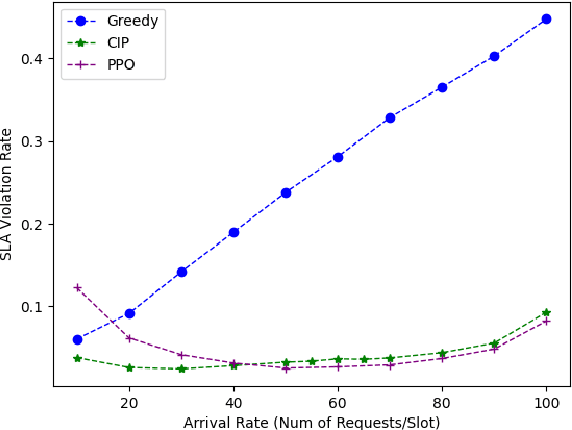
Network Slicing (NS) is crucial for efficiently enabling divergent network applications in next generation networks. Nonetheless, the complex Quality of Service (QoS) requirements and diverse heterogeneity in network services entails high computational time for Network Slice Provisioning (NSP) optimization. The legacy optimization methods are challenging to meet the low latency and high reliability of network applications. To this end, we model the real-time NSP as an Online Network Slice Provisioning (ONSP) problem. Specifically, we formulate the ONSP problem as an online Multi-Objective Integer Programming Optimization (MOIPO) problem. Then, we approximate the solution of the MOIPO problem by applying the Proximal Policy Optimization (PPO) method to the traffic demand prediction. Our simulation results show the effectiveness of the proposed method compared to the state-of-the-art MOIPO solvers with a lower SLA violation rate and network operation cost.
Robotic Aerial 6G Small Cells with Grasping End Effectors for mmWave Relay Backhauling
Feb 03, 2022Deployment of small cells in dense urban areas dedicated to the heterogeneous network (HetNet) and associated relay nodes for improving backhauling is expected to be an important structural element in the design of beyond 5G (B5G) and 6G wireless access networks. A key operational aspect in HetNets is how to optimally implement the wireless backhaul links to efficiently support the traffic demand. In this work, we utilize the recently proposed Robotic Aerial Small Cells (RASCs) that are able to grasp at different tall urban landforms as wireless relay nodes for backhauling. This can be considered as an alternative to fixed small cells (FSCs) which lack flexibility since once installed their position cannot be altered. More specifically, on-demand deployment of RASCs is considered for constructing a millimeter-wave (mmWave) backhaul network to optimize available network capacity using a network flow-based mixed integer linear programming (MILP) formulation. Numerical investigations reveal that for the same required achievable throughput, the number of RASCs required are 25\% to 65\% less than the number of required FSCs. This result can have significant implications in reducing required wireless network equipment (capex) to provide a given network capacity and allows for an efficient and flexible network densification.
A Minmax Utilization Algorithm for Network Traffic Scheduling of Industrial Robots
Nov 02, 2021



Emerging 5G and beyond wireless industrial virtualized networks are expected to support a significant number of robotic manipulators. Depending on the processes involved, these industrial robots might result in significant volume of multi-modal traffic that will need to traverse the network all the way to the (public/private) edge cloud, where advanced processing, control and service orchestration will be taking place. In this paper, we perform the traffic engineering by capitalizing on the underlying pseudo-deterministic nature of the repetitive processes of robotic manipulators in an industrial environment and propose an integer linear programming (ILP) model to minimize the maximum aggregate traffic in the network. The task sequence and time gap requirements are also considered in the proposed model. To tackle the curse of dimensionality in ILP, we provide a random search algorithm with quadratic time complexity. Numerical investigations reveal that the proposed scheme can reduce the peak data rate up to 53.4% compared with the nominal case where robotic manipulators operate in an uncoordinated fashion, resulting in significant improvement in the utilization of the underlying network resources.
Learning from Images: Proactive Caching with Parallel Convolutional Neural Networks
Aug 15, 2021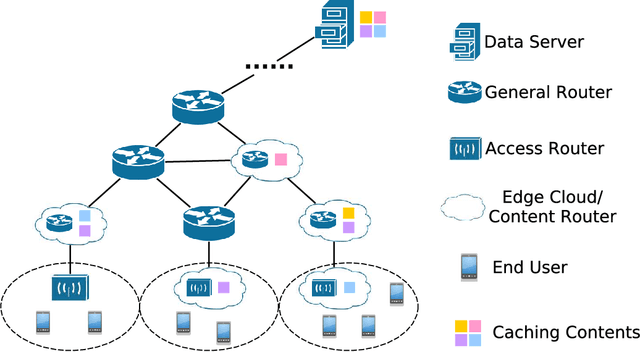
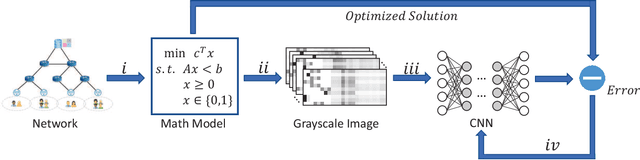
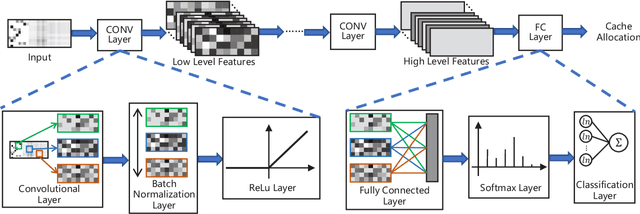
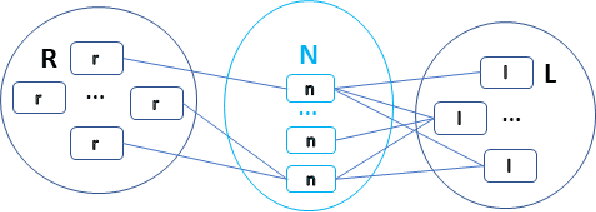
With the continuous trend of data explosion, delivering packets from data servers to end users causes increased stress on both the fronthaul and backhaul traffic of mobile networks. To mitigate this problem, caching popular content closer to the end-users has emerged as an effective method for reducing network congestion and improving user experience. To find the optimal locations for content caching, many conventional approaches construct various mixed integer linear programming (MILP) models. However, such methods may fail to support online decision making due to the inherent curse of dimensionality. In this paper, a novel framework for proactive caching is proposed. This framework merges model-based optimization with data-driven techniques by transforming an optimization problem into a grayscale image. For parallel training and simple design purposes, the proposed MILP model is first decomposed into a number of sub-problems and, then, convolutional neural networks (CNNs) are trained to predict content caching locations of these sub-problems. Furthermore, since the MILP model decomposition neglects the internal effects among sub-problems, the CNNs' outputs have the risk to be infeasible solutions. Therefore, two algorithms are provided: the first uses predictions from CNNs as an extra constraint to reduce the number of decision variables; the second employs CNNs' outputs to accelerate local search. Numerical results show that the proposed scheme can reduce 71.6% computation time with only 0.8% additional performance cost compared to the MILP solution, which provides high quality decision making in real-time.
Energy and Age Pareto Optimal Trajectories in UAV-assisted Wireless Data Collection
Jun 07, 2021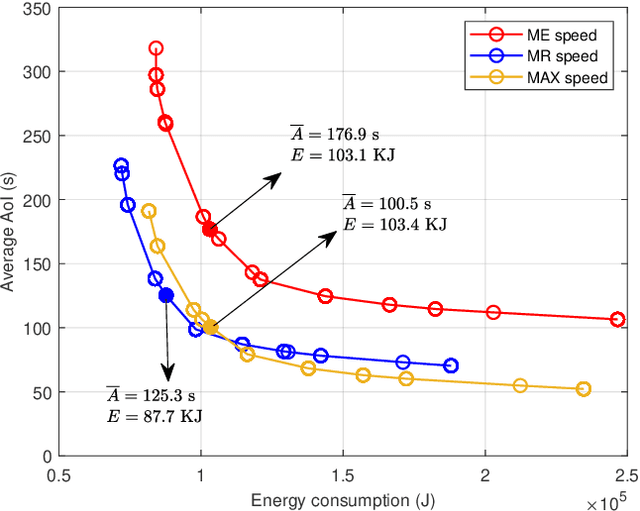
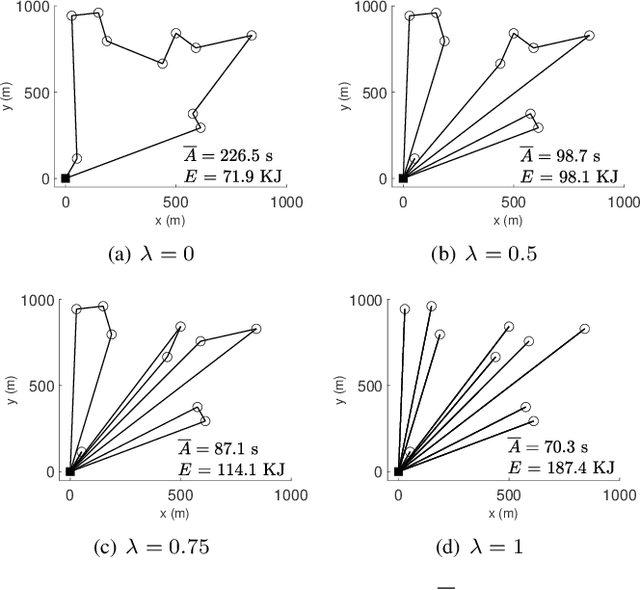
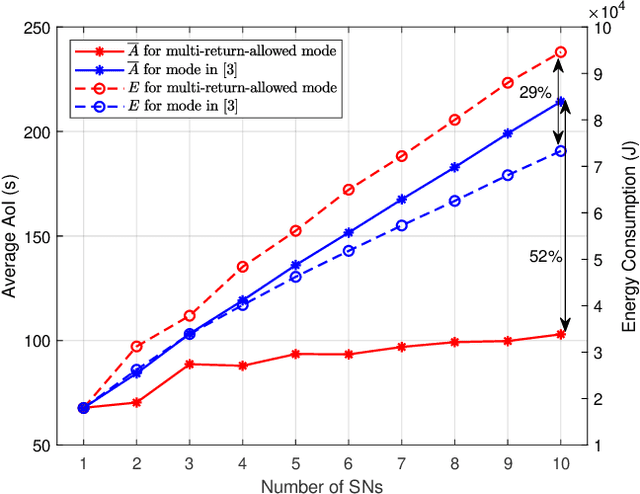
This paper studies an unmanned aerial vehicle (UAV)-assisted wireless network, where a UAV is dispatched to gather information from ground sensor nodes (SN) and transfer the collected data to the depot. The information freshness is captured by the age of information (AoI) metric, whilst the energy consumption of the UAV is seen as another performance criterion. Most importantly, the AoI and energy efficiency are inherently competing metrics, since decreasing the AoI requires the UAV returning to the depot more frequently, leading to a higher energy consumption. To this end, we design UAV paths that optimize these two competing metrics and reveal the Pareto frontier. To formulate this problem, a multi-objective mixed integer linear programming (MILP) is proposed with a flow-based constraint set and we apply Bender's decomposition on the proposed formulation. The overall outcome shows that the proposed method allows deriving non-dominated solutions for decision making for UAV based wireless data collection. Numerical results are provided to corroborate our study by presenting the Pareto front of the two objectives and the effect on the UAV trajectory.
Airborne Urban Microcells with Grasping End Effectors: A Game Changer for 6G Networks?
May 19, 2021
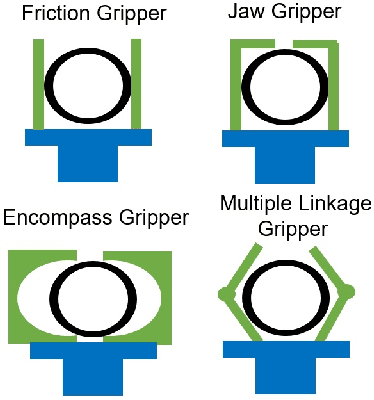

Airborne (or flying) base stations (ABSs) embedded on drones or unmanned aerial vehicles (UAVs) can be deemed as a central element of envisioned 6G cellular networks where significant cell densification with mmWave/Terahertz communications will be part of the ecosystem. Nonetheless, one of the key challenges facing the deployment of ABSs is the inherent limited available energy of the drone, which limits the hovering time for serving ground users to the orders of minutes. This impediment deteriorate the performance of the UAV-enabled cellular network and hinders wide adoption and use of the technology. In this paper, we propose robotic airborne base stations (RABSs) with grasping capabilities to increase the serving time of ground users by multiple orders of magnitude compared to nominal hovering based operation. More specifically, to perform the grasping task, the RABS is equipped with a versatile, albeit, general purpose gripper manipulator. Depending on the type of the gripper RABS can provide service in the range of hours, compared to minutes of hovering based ABSs. In theory it is possible that grasping can be energy neutral, hence the time of service can be bounded by the communications energy consumption. To illustrate the case, energy consumption comparison between hovering and grasping is performed in order to reveal the significant benefits of the proposed approach. Finally, overarching challenges, design considerations for RABS, and future avenues of research are outlined to realize the full potential of the proposed robotic aerial base stations.
Enhanced LSTM-based Service Decomposition for Mobile Augmented Reality
Apr 15, 2021
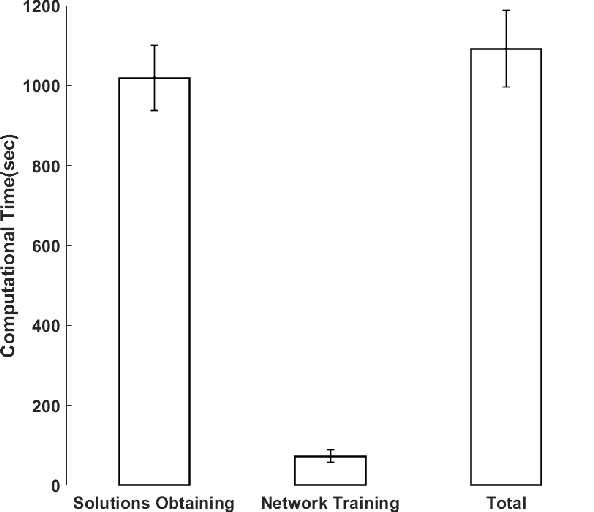

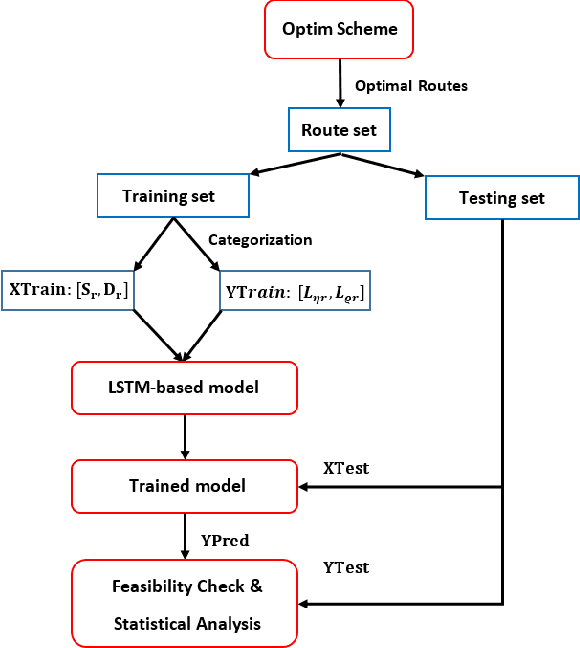
Undoubtedly, Mobile Augmented Reality (MAR) applications for 5G and Beyond wireless networks are witnessing a notable attention recently. However, they require significant computational and storage resources at the end device and/or the network via Edge Cloud (EC) support. In this work, a MAR service is considered under the lenses of microservices where MAR service components can be decomposed and anchored at different locations ranging from the end device to different ECs in order to optimize the overall service and network efficiency. To this end, we propose a mobility aware MAR service decomposition using a Long Short Term Memory (LSTM) deep neural network to provide efficient pro-active decision making in real-time. More specifically, the LSTM deep neural network is trained with optimal solutions derived from a mathematical programming formulation in an offline manner. Then, decision making at the inference stage is used to optimize service decomposition of MAR services. A wide set of numerical investigations reveal that the mobility aware LSTM deep neural network manage to outperform recently proposed schemes in terms of both decision making quality as well as computational time.
A Survey of Deep Learning for Data Caching in Edge Network
Aug 17, 2020

The concept of edge caching provision in emerging 5G and beyond mobile networks is a promising method to deal both with the traffic congestion problem in the core network as well as reducing latency to access popular content. In that respect end user demand for popular content can be satisfied by proactively caching it at the network edge, i.e, at close proximity to the users. In addition to model based caching schemes learning-based edge caching optimizations has recently attracted significant attention and the aim hereafter is to capture these recent advances for both model based and data driven techniques in the area of proactive caching. This paper summarizes the utilization of deep learning for data caching in edge network. We first outline the typical research topics in content caching and formulate a taxonomy based on network hierarchical structure. Then, a number of key types of deep learning algorithms are presented, ranging from supervised learning to unsupervised learning as well as reinforcement learning. Furthermore, a comparison of state-of-the-art literature is provided from the aspects of caching topics and deep learning methods. Finally, we discuss research challenges and future directions of applying deep learning for caching
Network Orchestration in Mobile Networks via a Synergy of Model-driven and AI-based Techniques
Apr 01, 2020


As data traffic volume continues to increase, caching of popular content at strategic network locations closer to the end user can enhance not only user experience but ease the utilization of highly congested links in the network. A key challenge in the area of proactive caching is finding the optimal locations to host the popular content items under various optimization criteria. These problems are combinatorial in nature and therefore finding optimal and/or near optimal decisions is computationally expensive. In this paper a framework is proposed to reduce the computational complexity of the underlying integer mathematical program by first predicting decision variables related to optimal locations using a deep convolutional neural network (CNN). The CNN is trained in an offline manner with optimal solutions and is then used to feed a much smaller optimization problems which is amenable for real-time decision making. Numerical investigations reveal that the proposed approach can provide in an online manner high quality decision making; a feature which is crucially important for real-world implementations.