 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirborne Urban Microcells with Grasping End Effectors: A Game Changer for 6G Networks?
Paper and Code
May 19, 2021
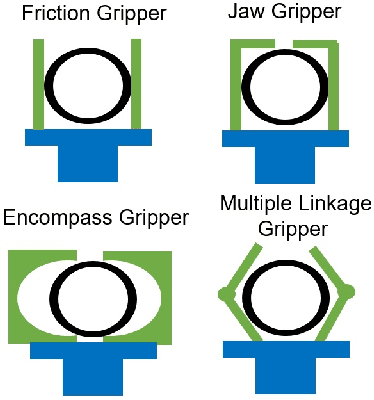

Airborne (or flying) base stations (ABSs) embedded on drones or unmanned aerial vehicles (UAVs) can be deemed as a central element of envisioned 6G cellular networks where significant cell densification with mmWave/Terahertz communications will be part of the ecosystem. Nonetheless, one of the key challenges facing the deployment of ABSs is the inherent limited available energy of the drone, which limits the hovering time for serving ground users to the orders of minutes. This impediment deteriorate the performance of the UAV-enabled cellular network and hinders wide adoption and use of the technology. In this paper, we propose robotic airborne base stations (RABSs) with grasping capabilities to increase the serving time of ground users by multiple orders of magnitude compared to nominal hovering based operation. More specifically, to perform the grasping task, the RABS is equipped with a versatile, albeit, general purpose gripper manipulator. Depending on the type of the gripper RABS can provide service in the range of hours, compared to minutes of hovering based ABSs. In theory it is possible that grasping can be energy neutral, hence the time of service can be bounded by the communications energy consumption. To illustrate the case, energy consumption comparison between hovering and grasping is performed in order to reveal the significant benefits of the proposed approach. Finally, overarching challenges, design considerations for RABS, and future avenues of research are outlined to realize the full potential of the proposed robotic aerial base stations.