 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVidarc: Embodied Video Diffusion Model for Closed-loop Control
Dec 19, 2025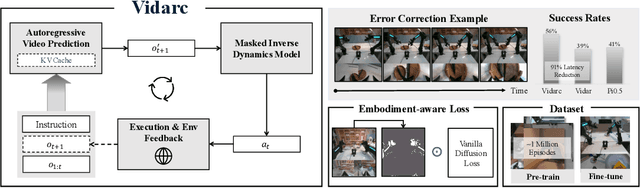
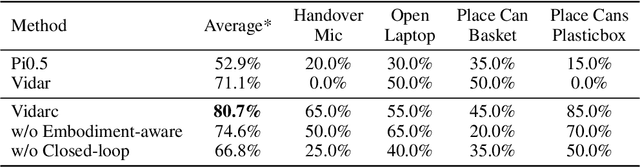
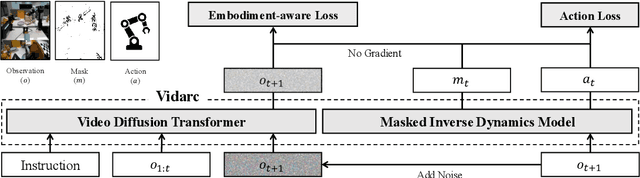
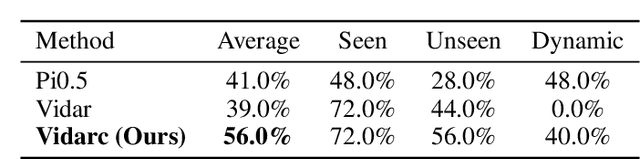
Robotic arm manipulation in data-scarce settings is a highly challenging task due to the complex embodiment dynamics and diverse contexts. Recent video-based approaches have shown great promise in capturing and transferring the temporal and physical interactions by pre-training on Internet-scale video data. However, such methods are often not optimized for the embodiment-specific closed-loop control, typically suffering from high latency and insufficient grounding. In this paper, we present Vidarc (Video Diffusion for Action Reasoning and Closed-loop Control), a novel autoregressive embodied video diffusion approach augmented by a masked inverse dynamics model. By grounding video predictions with action-relevant masks and incorporating real-time feedback through cached autoregressive generation, Vidarc achieves fast, accurate closed-loop control. Pre-trained on one million cross-embodiment episodes, Vidarc surpasses state-of-the-art baselines, achieving at least a 15% higher success rate in real-world deployment and a 91% reduction in latency. We also highlight its robust generalization and error correction capabilities across previously unseen robotic platforms.
ManiBox: Enhancing Spatial Grasping Generalization via Scalable Simulation Data Generation
Nov 04, 2024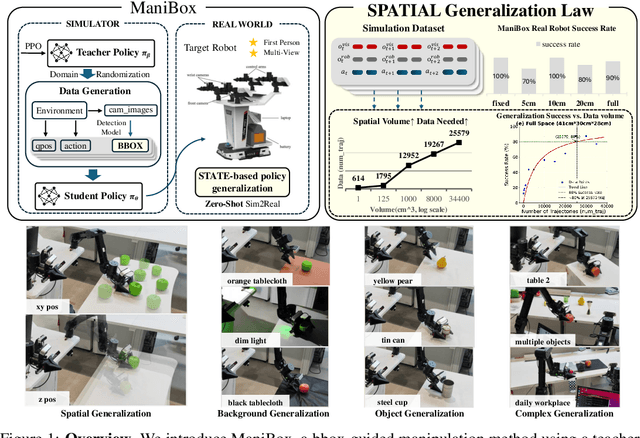
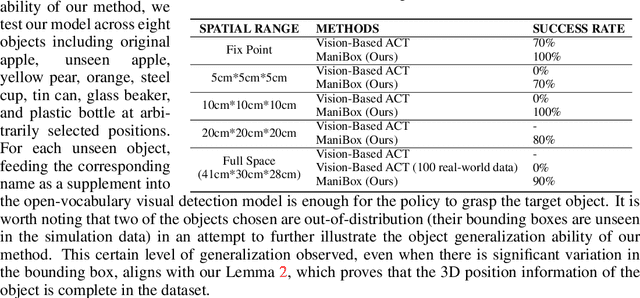
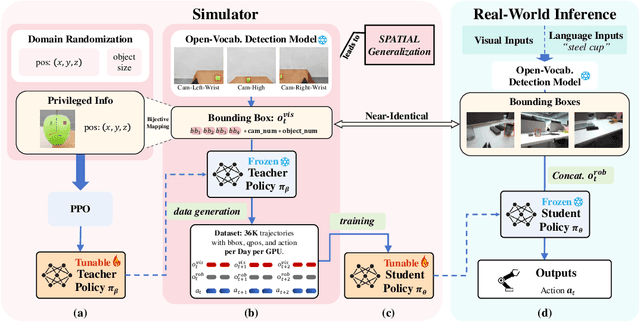

Learning a precise robotic grasping policy is crucial for embodied agents operating in complex real-world manipulation tasks. Despite significant advancements, most models still struggle with accurate spatial positioning of objects to be grasped. We first show that this spatial generalization challenge stems primarily from the extensive data requirements for adequate spatial understanding. However, collecting such data with real robots is prohibitively expensive, and relying on simulation data often leads to visual generalization gaps upon deployment. To overcome these challenges, we then focus on state-based policy generalization and present \textbf{ManiBox}, a novel bounding-box-guided manipulation method built on a simulation-based teacher-student framework. The teacher policy efficiently generates scalable simulation data using bounding boxes, which are proven to uniquely determine the objects' spatial positions. The student policy then utilizes these low-dimensional spatial states to enable zero-shot transfer to real robots. Through comprehensive evaluations in simulated and real-world environments, ManiBox demonstrates a marked improvement in spatial grasping generalization and adaptability to diverse objects and backgrounds. Further, our empirical study into scaling laws for policy performance indicates that spatial volume generalization scales positively with data volume. For a certain level of spatial volume, the success rate of grasping empirically follows Michaelis-Menten kinetics relative to data volume, showing a saturation effect as data increases. Our videos and code are available in https://thkkk.github.io/manibox.