 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Noise Removal in Hyperspectral Images via Representative Coefficient Total Variation
Nov 03, 2022Mining structural priors in data is a widely recognized technique for hyperspectral image (HSI) denoising tasks, whose typical ways include model-based methods and data-based methods. The model-based methods have good generalization ability, while the runtime cannot meet the fast processing requirements of the practical situations due to the large size of an HSI data $ \mathbf{X} \in \mathbb{R}^{MN\times B}$. For the data-based methods, they perform very fast on new test data once they have been trained. However, their generalization ability is always insufficient. In this paper, we propose a fast model-based HSI denoising approach. Specifically, we propose a novel regularizer named Representative Coefficient Total Variation (RCTV) to simultaneously characterize the low rank and local smooth properties. The RCTV regularizer is proposed based on the observation that the representative coefficient matrix $\mathbf{U}\in\mathbb{R}^{MN\times R} (R\ll B)$ obtained by orthogonally transforming the original HSI $\mathbf{X}$ can inherit the strong local-smooth prior of $\mathbf{X}$. Since $R/B$ is very small, the HSI denoising model based on the RCTV regularizer has lower time complexity. Additionally, we find that the representative coefficient matrix $\mathbf{U}$ is robust to noise, and thus the RCTV regularizer can somewhat promote the robustness of the HSI denoising model. Extensive experiments on mixed noise removal demonstrate the superiority of the proposed method both in denoising performance and denoising speed compared with other state-of-the-art methods. Remarkably, the denoising speed of our proposed method outperforms all the model-based techniques and is comparable with the deep learning-based approaches.
Monocular Depth Estimation with Sharp Boundary
Oct 12, 2021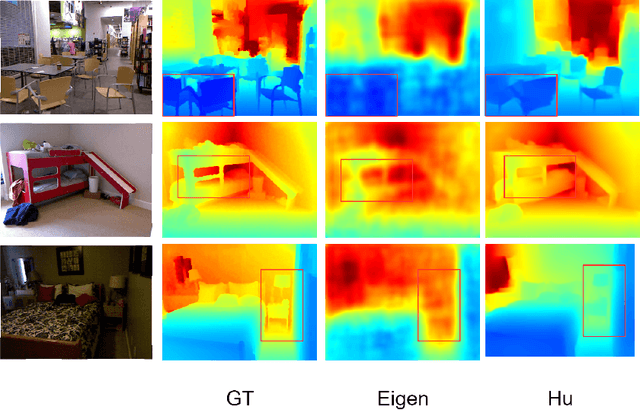
Monocular depth estimation is the base task in computer vision. It has a tremendous development in the decade with the development of deep learning. But the boundary blur of the depth map is still a serious problem. Research finds the boundary blur problem is mainly caused by two factors, first, the low-level features containing boundary and structure information may loss in deeper networks during the convolution process., second, the model ignores the errors introduced by the boundary area due to the few portions of the boundary in the whole areas during the backpropagation. In order to mitigate the boundary blur problem, we focus on the above two impact factors. Firstly, we design a scene understanding module to learn the global information with low- and high-level features, and then to transform the global information to different scales with our proposed scale transform module according to the different phases in the decoder. Secondly, we propose a boundary-aware depth loss function to pay attention to the effects of the boundary's depth value. The extensive experiments show that our method can predict the depth maps with clearer boundaries, and the performance of the depth accuracy base on NYU-depth v2 and SUN RGB-D is competitive.