 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Depth Estimation with Sharp Boundary
Paper and Code
Oct 12, 2021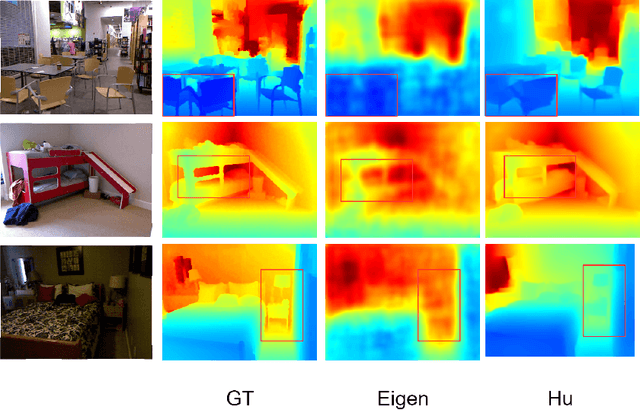
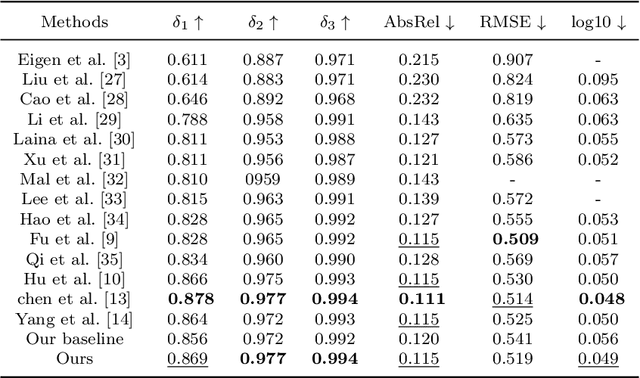
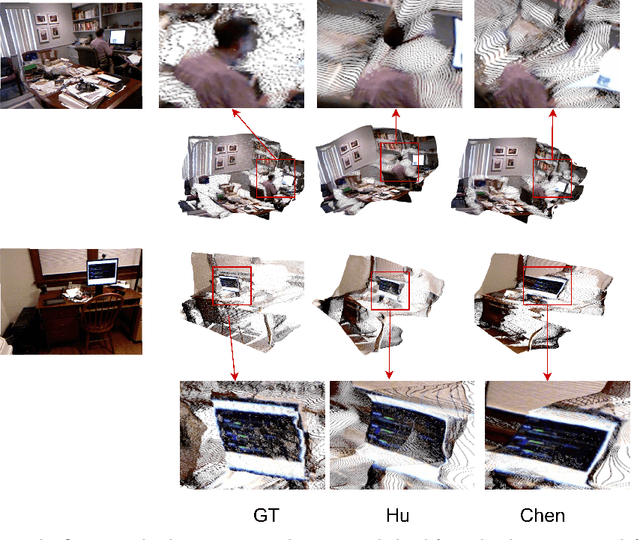
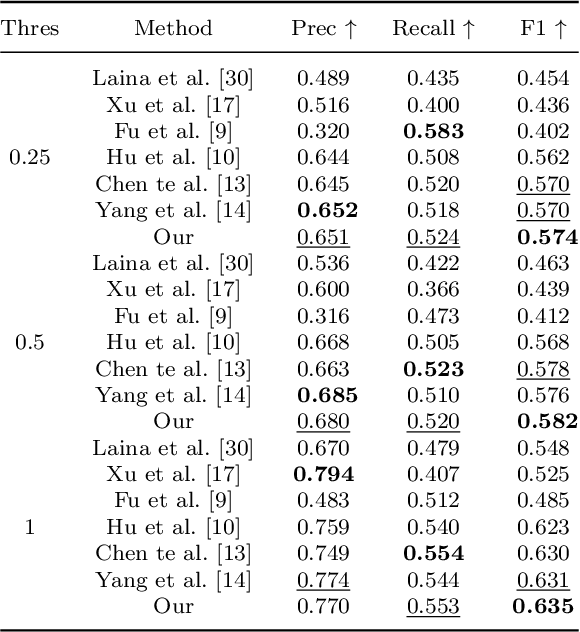
Monocular depth estimation is the base task in computer vision. It has a tremendous development in the decade with the development of deep learning. But the boundary blur of the depth map is still a serious problem. Research finds the boundary blur problem is mainly caused by two factors, first, the low-level features containing boundary and structure information may loss in deeper networks during the convolution process., second, the model ignores the errors introduced by the boundary area due to the few portions of the boundary in the whole areas during the backpropagation. In order to mitigate the boundary blur problem, we focus on the above two impact factors. Firstly, we design a scene understanding module to learn the global information with low- and high-level features, and then to transform the global information to different scales with our proposed scale transform module according to the different phases in the decoder. Secondly, we propose a boundary-aware depth loss function to pay attention to the effects of the boundary's depth value. The extensive experiments show that our method can predict the depth maps with clearer boundaries, and the performance of the depth accuracy base on NYU-depth v2 and SUN RGB-D is competitive.