 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Task-invariant Interaction and Task-specific Adaptation for Unified Image Fusion
Apr 07, 2025



Unified image fusion aims to integrate complementary information from multi-source images, enhancing image quality through a unified framework applicable to diverse fusion tasks. While treating all fusion tasks as a unified problem facilitates task-invariant knowledge sharing, it often overlooks task-specific characteristics, thereby limiting the overall performance. Existing general image fusion methods incorporate explicit task identification to enable adaptation to different fusion tasks. However, this dependence during inference restricts the model's generalization to unseen fusion tasks. To address these issues, we propose a novel unified image fusion framework named "TITA", which dynamically balances both Task-invariant Interaction and Task-specific Adaptation. For task-invariant interaction, we introduce the Interaction-enhanced Pixel Attention (IPA) module to enhance pixel-wise interactions for better multi-source complementary information extraction. For task-specific adaptation, the Operation-based Adaptive Fusion (OAF) module dynamically adjusts operation weights based on task properties. Additionally, we incorporate the Fast Adaptive Multitask Optimization (FAMO) strategy to mitigate the impact of gradient conflicts across tasks during joint training. Extensive experiments demonstrate that TITA not only achieves competitive performance compared to specialized methods across three image fusion scenarios but also exhibits strong generalization to unseen fusion tasks.
GITSR: Graph Interaction Transformer-based Scene Representation for Multi Vehicle Collaborative Decision-making
Nov 03, 2024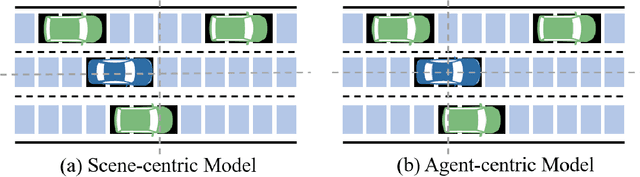
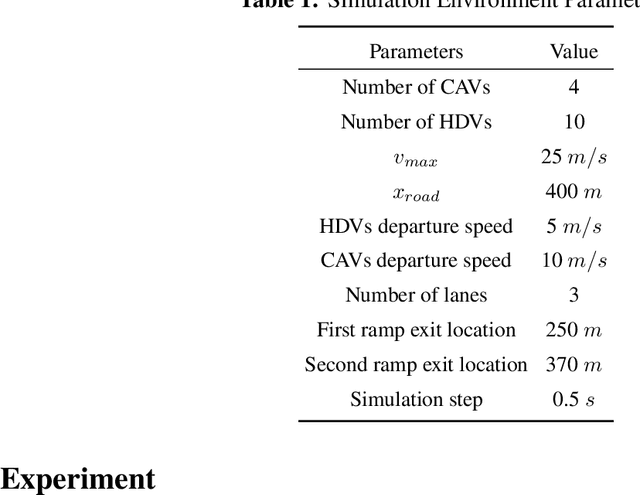
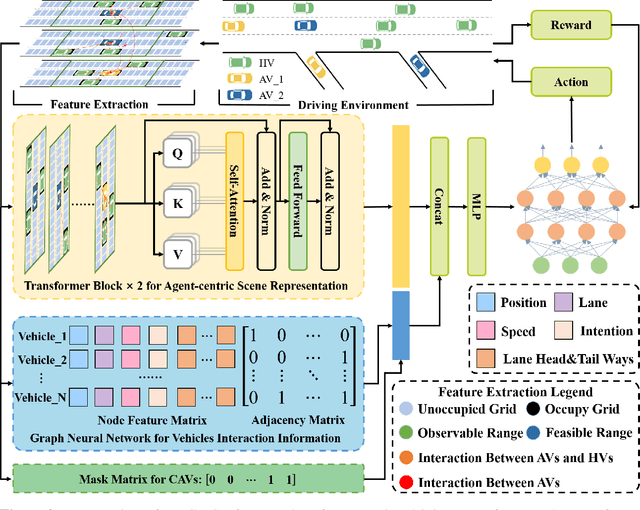
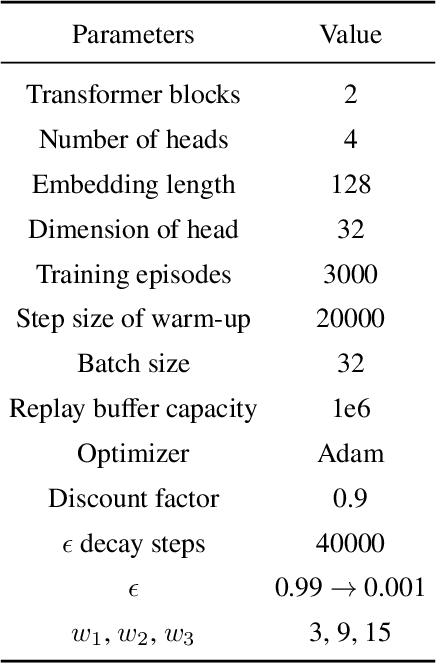
In this study, we propose GITSR, an effective framework for Graph Interaction Transformer-based Scene Representation for multi-vehicle collaborative decision-making in intelligent transportation system. In the context of mixed traffic where Connected Automated Vehicles (CAVs) and Human Driving Vehicles (HDVs) coexist, in order to enhance the understanding of the environment by CAVs to improve decision-making capabilities, this framework focuses on efficient scene representation and the modeling of spatial interaction behaviors of traffic states. We first extract features of the driving environment based on the background of intelligent networking. Subsequently, the local scene representation, which is based on the agent-centric and dynamic occupation grid, is calculated by the Transformer module. Besides, feasible region of the map is captured through the multi-head attention mechanism to reduce the collision of vehicles. Notably, spatial interaction behaviors, based on motion information, are modeled as graph structures and extracted via Graph Neural Network (GNN). Ultimately, the collaborative decision-making among multiple vehicles is formulated as a Markov Decision Process (MDP), with driving actions output by Reinforcement Learning (RL) algorithms. Our algorithmic validation is executed within the extremely challenging scenario of highway off-ramp task, thereby substantiating the superiority of agent-centric approach to scene representation. Simulation results demonstrate that the GITSR method can not only effectively capture scene representation but also extract spatial interaction data, outperforming the baseline method across various comparative metrics.
Enhancing Consistency and Mitigating Bias: A Data Replay Approach for Incremental Learning
Jan 12, 2024



Deep learning systems are prone to catastrophic forgetting when learning from a sequence of tasks, where old data from experienced tasks is unavailable when learning from a new task. To mitigate the problem, a line of methods propose to replay the data of experienced tasks when learning new tasks. These methods usually adopt an extra memory to store the data for replay. However, it is not expected in practice considering the memory constraint or data privacy issue. As a replacement, data-free data replay methods are proposed by inverting samples from the classification model. Though achieving good results, these methods still suffer from the inconsistency of the inverted and real training data, which is neglected in the inversion stage in recent works. To that effect, we propose to measure the data consistency quantitatively by some simplification and assumptions. Using the measurement, we analyze existing techniques for inverting samples and get some insightful information that inspires a novel loss function to reduce the inconsistency. Specifically, the loss minimizes the KL divergence of the distributions of inverted and real data under the tied multivariate Gaussian assumption, which is easy to implement in continual learning. In addition, we observe that the norms of old class weights turn to decrease continually as learning progresses. We thus analyze the underlying reasons and propose a simple regularization term to balance the class weights so that the samples of old classes are more distinguishable. To conclude, we propose the Consistency enhanced data replay with debiased classifier for Class Incremental Learning (CCIL). Extensive experiments on CIFAR-100, Tiny-ImageNet, and ImageNet100 show consistently improved performance of CCIL compared to previous approaches.