 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology Enhanced MARL for Multi-Vehicle Cooperative Decision-Making of CAVs
Jul 16, 2025The exploration-exploitation trade-off constitutes one of the fundamental challenges in reinforcement learning (RL), which is exacerbated in multi-agent reinforcement learning (MARL) due to the exponential growth of joint state-action spaces. This paper proposes a topology-enhanced MARL (TPE-MARL) method for optimizing cooperative decision-making of connected and autonomous vehicles (CAVs) in mixed traffic. This work presents two primary contributions: First, we construct a game topology tensor for dynamic traffic flow, effectively compressing high-dimensional traffic state information and decrease the search space for MARL algorithms. Second, building upon the designed game topology tensor and using QMIX as the backbone RL algorithm, we establish a topology-enhanced MARL framework incorporating visit counts and agent mutual information. Extensive simulations across varying traffic densities and CAV penetration rates demonstrate the effectiveness of TPE-MARL. Evaluations encompassing training dynamics, exploration patterns, macroscopic traffic performance metrics, and microscopic vehicle behaviors reveal that TPE-MARL successfully balances exploration and exploitation. Consequently, it exhibits superior performance in terms of traffic efficiency, safety, decision smoothness, and task completion. Furthermore, the algorithm demonstrates decision-making rationality comparable to or exceeding that of human drivers in both mixed-autonomy and fully autonomous traffic scenarios. Code of our work is available at \href{https://github.com/leoPub/tpemarl}{https://github.com/leoPub/tpemarl}.
GITSR: Graph Interaction Transformer-based Scene Representation for Multi Vehicle Collaborative Decision-making
Nov 03, 2024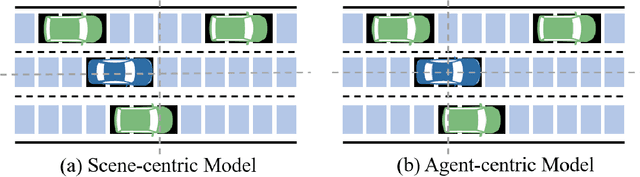
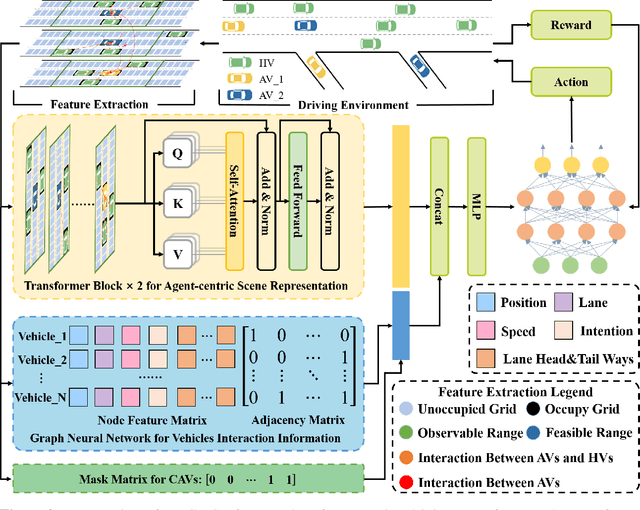
In this study, we propose GITSR, an effective framework for Graph Interaction Transformer-based Scene Representation for multi-vehicle collaborative decision-making in intelligent transportation system. In the context of mixed traffic where Connected Automated Vehicles (CAVs) and Human Driving Vehicles (HDVs) coexist, in order to enhance the understanding of the environment by CAVs to improve decision-making capabilities, this framework focuses on efficient scene representation and the modeling of spatial interaction behaviors of traffic states. We first extract features of the driving environment based on the background of intelligent networking. Subsequently, the local scene representation, which is based on the agent-centric and dynamic occupation grid, is calculated by the Transformer module. Besides, feasible region of the map is captured through the multi-head attention mechanism to reduce the collision of vehicles. Notably, spatial interaction behaviors, based on motion information, are modeled as graph structures and extracted via Graph Neural Network (GNN). Ultimately, the collaborative decision-making among multiple vehicles is formulated as a Markov Decision Process (MDP), with driving actions output by Reinforcement Learning (RL) algorithms. Our algorithmic validation is executed within the extremely challenging scenario of highway off-ramp task, thereby substantiating the superiority of agent-centric approach to scene representation. Simulation results demonstrate that the GITSR method can not only effectively capture scene representation but also extract spatial interaction data, outperforming the baseline method across various comparative metrics.
Vehicle Trajectory Prediction based Predictive Collision Risk Assessment for Autonomous Driving in Highway Scenarios
Apr 12, 2023For driving safely and efficiently in highway scenarios, autonomous vehicles (AVs) must be able to predict future behaviors of surrounding object vehicles (OVs), and assess collision risk accurately for reasonable decision-making. Aiming at autonomous driving in highway scenarios, a predictive collision risk assessment method based on trajectory prediction of OVs is proposed in this paper. Firstly, the vehicle trajectory prediction is formulated as a sequence generation task with long short-term memory (LSTM) encoder-decoder framework. Convolutional social pooling (CSP) and graph attention network (GAN) are adopted for extracting local spatial vehicle interactions and distant spatial vehicle interactions, respectively. Then, two basic risk metrics, time-to-collision (TTC) and minimal distance margin (MDM), are calculated between the predicted trajectory of OV and the candidate trajectory of AV. Consequently, a time-continuous risk function is constructed with temporal and spatial risk metrics. Finally, the vehicle trajectory prediction model CSP-GAN-LSTM is evaluated on two public highway datasets. The quantitative results indicate that the proposed CSP-GAN-LSTM model outperforms the existing state-of-the-art (SOTA) methods in terms of position prediction accuracy. Besides, simulation results in typical highway scenarios further validate the feasibility and effectiveness of the proposed predictive collision risk assessment method.