 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGITSR: Graph Interaction Transformer-based Scene Representation for Multi Vehicle Collaborative Decision-making
Nov 03, 2024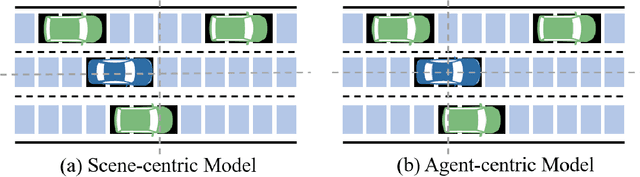
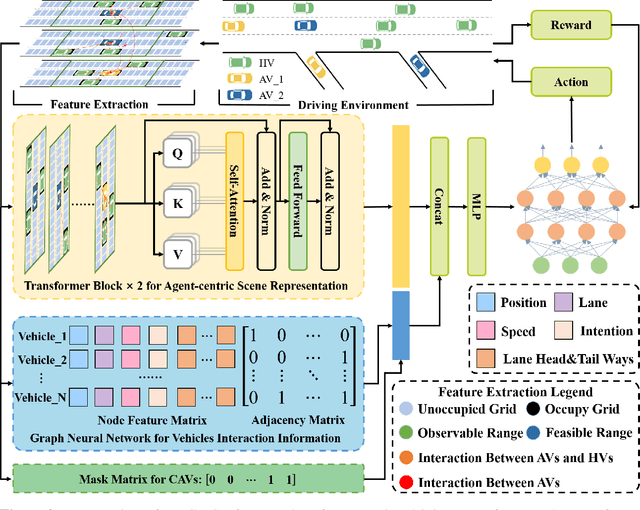
In this study, we propose GITSR, an effective framework for Graph Interaction Transformer-based Scene Representation for multi-vehicle collaborative decision-making in intelligent transportation system. In the context of mixed traffic where Connected Automated Vehicles (CAVs) and Human Driving Vehicles (HDVs) coexist, in order to enhance the understanding of the environment by CAVs to improve decision-making capabilities, this framework focuses on efficient scene representation and the modeling of spatial interaction behaviors of traffic states. We first extract features of the driving environment based on the background of intelligent networking. Subsequently, the local scene representation, which is based on the agent-centric and dynamic occupation grid, is calculated by the Transformer module. Besides, feasible region of the map is captured through the multi-head attention mechanism to reduce the collision of vehicles. Notably, spatial interaction behaviors, based on motion information, are modeled as graph structures and extracted via Graph Neural Network (GNN). Ultimately, the collaborative decision-making among multiple vehicles is formulated as a Markov Decision Process (MDP), with driving actions output by Reinforcement Learning (RL) algorithms. Our algorithmic validation is executed within the extremely challenging scenario of highway off-ramp task, thereby substantiating the superiority of agent-centric approach to scene representation. Simulation results demonstrate that the GITSR method can not only effectively capture scene representation but also extract spatial interaction data, outperforming the baseline method across various comparative metrics.