 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNL2Repo-Bench: Towards Long-Horizon Repository Generation Evaluation of Coding Agents
Dec 14, 2025Recent advances in coding agents suggest rapid progress toward autonomous software development, yet existing benchmarks fail to rigorously evaluate the long-horizon capabilities required to build complete software systems. Most prior evaluations focus on localized code generation, scaffolded completion, or short-term repair tasks, leaving open the question of whether agents can sustain coherent reasoning, planning, and execution over the extended horizons demanded by real-world repository construction. To address this gap, we present NL2Repo Bench, a benchmark explicitly designed to evaluate the long-horizon repository generation ability of coding agents. Given only a single natural-language requirements document and an empty workspace, agents must autonomously design the architecture, manage dependencies, implement multi-module logic, and produce a fully installable Python library. Our experiments across state-of-the-art open- and closed-source models reveal that long-horizon repository generation remains largely unsolved: even the strongest agents achieve below 40% average test pass rates and rarely complete an entire repository correctly. Detailed analysis uncovers fundamental long-horizon failure modes, including premature termination, loss of global coherence, fragile cross-file dependencies, and inadequate planning over hundreds of interaction steps. NL2Repo Bench establishes a rigorous, verifiable testbed for measuring sustained agentic competence and highlights long-horizon reasoning as a central bottleneck for the next generation of autonomous coding agents.
A Comprehensive Dynamic Simulation Framework for Coupled Neuromusculoskeletal-Exoskeletal Systems
Nov 04, 2023


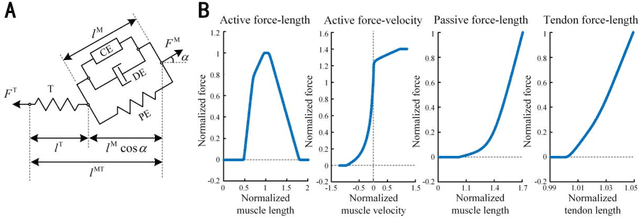
The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. However, conventional dynamic simulation frameworks have limitations due to their reliance on experimental data and their inability to capture comprehensive biomechanical signals and dynamic responses. To address these challenges, we introduce an optimization-based dynamic simulation framework that integrates a complete neuromusculoskeletal feedback loop, rigid-body dynamics, human-exoskeleton interaction, and foot-ground contact. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To validate the effectiveness of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can effectively and accurately capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals under varying walking conditions. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.