 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Dynamic Simulation Framework for Coupled Neuromusculoskeletal-Exoskeletal Systems
Nov 04, 2023


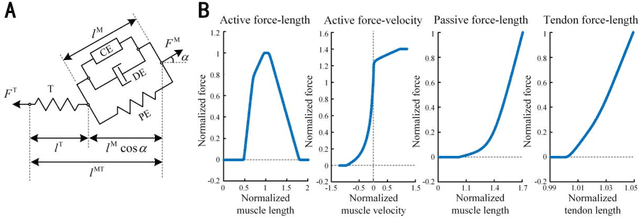
The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. However, conventional dynamic simulation frameworks have limitations due to their reliance on experimental data and their inability to capture comprehensive biomechanical signals and dynamic responses. To address these challenges, we introduce an optimization-based dynamic simulation framework that integrates a complete neuromusculoskeletal feedback loop, rigid-body dynamics, human-exoskeleton interaction, and foot-ground contact. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To validate the effectiveness of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can effectively and accurately capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals under varying walking conditions. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.
Dynamic models for Planar Peristaltic Locomotion of a Metameric Earthworm-like Robot
Mar 21, 2023



The development of versatile robots capable of traversing challenging and irregular environments is of increasing interest in the field of robotics, and metameric robots have been identified as a promising solution due to their slender, deformable bodies. Inspired by the effective locomotion of earthworms, earthworm-like robots capable of both rectilinear and planar locomotion have been designed and prototyped. While much research has focused on developing kinematic models to describe the planar locomotion of earthworm-like robots, the authors argue that the development of dynamic models is critical to improving the accuracy and efficiency of these robots. A comprehensive analysis of the dynamics of a metameric earthworm-like robot capable of planar motion is presented in this work. The model takes into account the complex interactions between the robot's deformable body and the forces acting on it and draws on the methods previously used to develop mathematical models of snake-like robots. The proposed model represents a significant advancement in the field of metameric robotics and has the potential to enhance the performance of earthworm-like robots in a variety of challenging environments, such as underground pipes and tunnels, and serves as a foundation for future research into the dynamics of soft-bodied robots.
An Earthworm-Inspired Multi-Mode Underwater Locomotion Robot: Design, Modeling, and Experiments
Aug 12, 2021



Faced with strong demand for robots working in underwater pipeline environments, a novel underwater multi-model locomotion robot is designed and studied in this research. By mimicking the earthworm's metameric body, the robot is segmented in the structure; by synthesizing the earthworm-like peristaltic locomotion mechanism and the propeller-driven swimming mechanism, the robot possesses unique multi-mode locomotion capability. In detail, the in-pipe earthworm-like peristaltic crawling is achieved based on servomotor-driven cords and pre-bent spring-steel belts that work antagonistically, and the three-dimensional underwater swimming is realized by four independently-controlled propellers. With a robot covering made of silicon rubber, the two locomotion modes are tested in the underwater environment, through which, the rationality and the effectiveness of the robot design are demonstrated. Aiming at predicting the robotic locomotion performance, mechanical models of the robot are further developed. For the underwater swimming mode, by considering the robot as a spheroid, an equivalent dynamic model is constructed, whose validity is verified via computational fluid dynamics (CFD) simulations; for the in-pipe crawling mode, a classical kinematics model is employed to predict the average locomotion speeds under different gait controls. The outcomes of this research could offer useful design and modeling guidelines for the development of earthworm-like locomotion robots with unique underwater multi-mode locomotion capability.