 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassification of kinetic-related injury in hospital triage data using NLP
Sep 05, 2025Triage notes, created at the start of a patient's hospital visit, contain a wealth of information that can help medical staff and researchers understand Emergency Department patient epidemiology and the degree of time-dependent illness or injury. Unfortunately, applying modern Natural Language Processing and Machine Learning techniques to analyse triage data faces some challenges: Firstly, hospital data contains highly sensitive information that is subject to privacy regulation thus need to be analysed on site; Secondly, most hospitals and medical facilities lack the necessary hardware to fine-tune a Large Language Model (LLM), much less training one from scratch; Lastly, to identify the records of interest, expert inputs are needed to manually label the datasets, which can be time-consuming and costly. We present in this paper a pipeline that enables the classification of triage data using LLM and limited compute resources. We first fine-tuned a pre-trained LLM with a classifier using a small (2k) open sourced dataset on a GPU; and then further fine-tuned the model with a hospital specific dataset of 1000 samples on a CPU. We demonstrated that by carefully curating the datasets and leveraging existing models and open sourced data, we can successfully classify triage data with limited compute resources.
RG-CAT: Detection Pipeline and Catalogue of Radio Galaxies in the EMU Pilot Survey
Mar 21, 2024We present source detection and catalogue construction pipelines to build the first catalogue of radio galaxies from the 270 $\rm deg^2$ pilot survey of the Evolutionary Map of the Universe (EMU-PS) conducted with the Australian Square Kilometre Array Pathfinder (ASKAP) telescope. The detection pipeline uses Gal-DINO computer-vision networks (Gupta et al., 2024) to predict the categories of radio morphology and bounding boxes for radio sources, as well as their potential infrared host positions. The Gal-DINO network is trained and evaluated on approximately 5,000 visually inspected radio galaxies and their infrared hosts, encompassing both compact and extended radio morphologies. We find that the Intersection over Union (IoU) for the predicted and ground truth bounding boxes is larger than 0.5 for 99% of the radio sources, and 98% of predicted host positions are within $3^{\prime \prime}$ of the ground truth infrared host in the evaluation set. The catalogue construction pipeline uses the predictions of the trained network on the radio and infrared image cutouts based on the catalogue of radio components identified using the Selavy source finder algorithm. Confidence scores of the predictions are then used to prioritize Selavy components with higher scores and incorporate them first into the catalogue. This results in identifications for a total of 211,625 radio sources, with 201,211 classified as compact and unresolved. The remaining 10,414 are categorized as extended radio morphologies, including 582 FR-I, 5,602 FR-II, 1,494 FR-x (uncertain whether FR-I or FR-II), 2,375 R (single-peak resolved) radio galaxies, and 361 with peculiar and other rare morphologies. We cross-match the radio sources in the catalogue with the infrared and optical catalogues, finding infrared cross-matches for 73% and photometric redshifts for 36% of the radio galaxies.
TurtleRabbit 2024 SSL Team Description Paper
Feb 13, 2024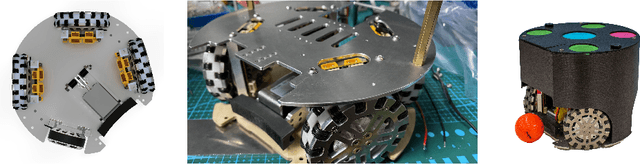
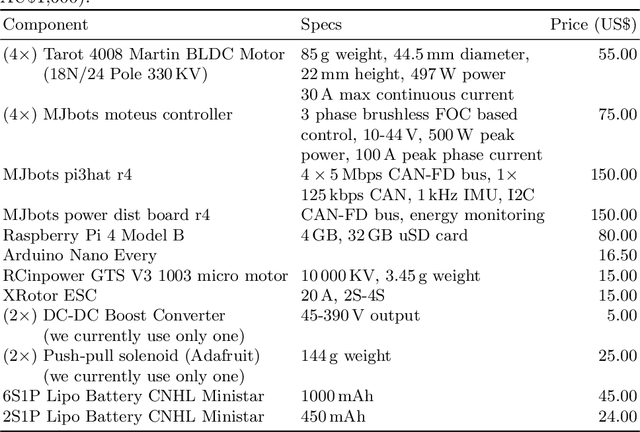
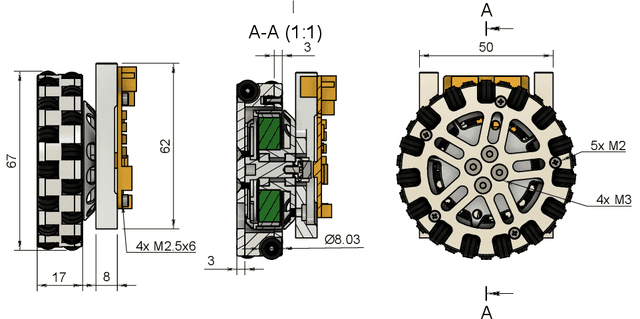
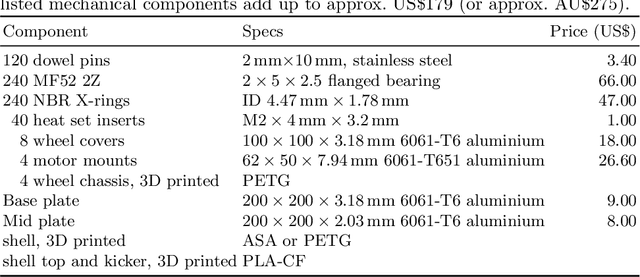
TurtleRabbit is a new RoboCup SSL team from Western Sydney University. This team description paper presents our approach in navigating some of the challenges in developing a new SSL team from scratch. SSL is dominated by teams with extensive experience and customised equipment that has been developed over many years. Here, we outline our approach in overcoming some of the complexities associated with replicating advanced open-sourced designs and managing the high costs of custom components. Opting for simplicity and cost-effectiveness, our strategy primarily employs off-the-shelf electronics components and ``hobby'' brushless direct current (BLDC) motors, complemented by 3D printing and CNC milling. This approach helped us to streamline the development process and, with our open-sourced hardware design, hopefully will also lower the bar for other teams to enter RoboCup SSL in the future. The paper details the specific hardware choices, their approximate costs, the integration of electronics and mechanics, and the initial steps taken in software development, for our entry into SSL that aims to be simple yet competitive.
Deep Learning for Morphological Identification of Extended Radio Galaxies using Weak Labels
Aug 09, 2023The present work discusses the use of a weakly-supervised deep learning algorithm that reduces the cost of labelling pixel-level masks for complex radio galaxies with multiple components. The algorithm is trained on weak class-level labels of radio galaxies to get class activation maps (CAMs). The CAMs are further refined using an inter-pixel relations network (IRNet) to get instance segmentation masks over radio galaxies and the positions of their infrared hosts. We use data from the Australian Square Kilometre Array Pathfinder (ASKAP) telescope, specifically the Evolutionary Map of the Universe (EMU) Pilot Survey, which covered a sky area of 270 square degrees with an RMS sensitivity of 25-35 $\mu$Jy/beam. We demonstrate that weakly-supervised deep learning algorithms can achieve high accuracy in predicting pixel-level information, including masks for the extended radio emission encapsulating all galaxy components and the positions of the infrared host galaxies. We evaluate the performance of our method using mean Average Precision (mAP) across multiple classes at a standard intersection over union (IoU) threshold of 0.5. We show that the model achieves a mAP$_{50}$ of 67.5\% and 76.8\% for radio masks and infrared host positions, respectively. The network architecture can be found at the following link: https://github.com/Nikhel1/Gal-CAM
Peak Alignment of GC-MS Data with Deep Learning
Apr 02, 2019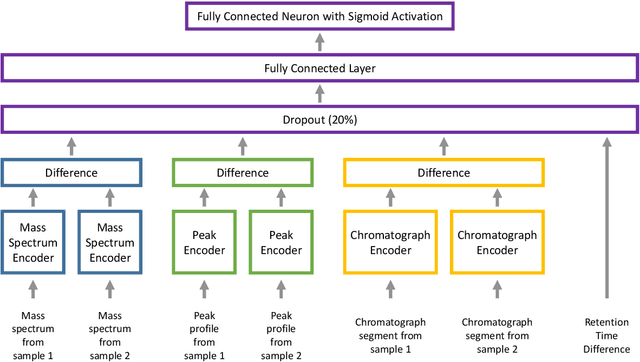
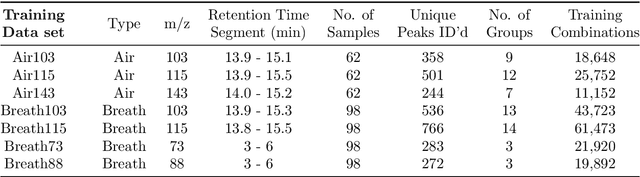
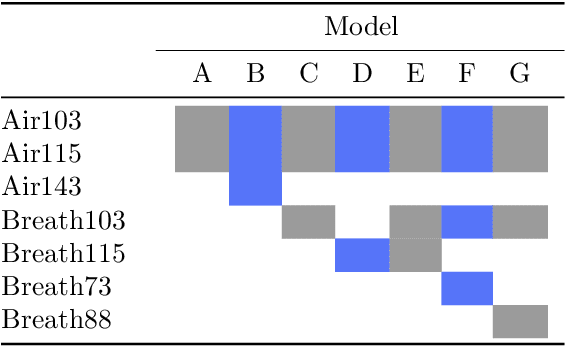
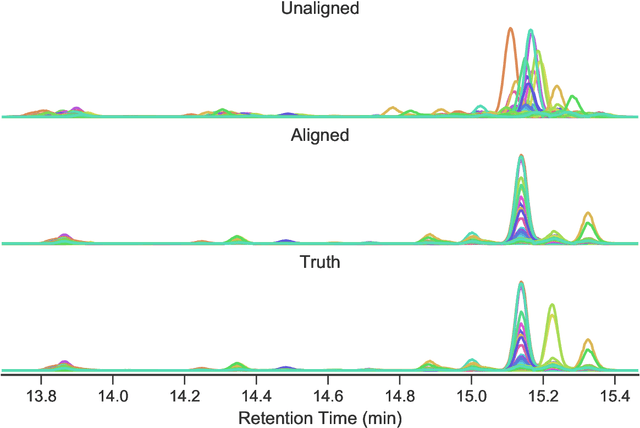
We present ChromAlignNet, a deep learning model for alignment of peaks in Gas Chromatogram-Mass Spectrometry (GC-MS) data. GC-MS is regarded as a gold standard in analysis of chemical composition in samples. However, due to the complexity of the instrument, a substance's retention time (RT) may not stay fixed across multiple GC-MS chromatograms. To use GC-MS data for biomarker discovery requires alignment of identical analyte's RT from different samples. Current methods of alignment are all based on a set of formal, mathematical rules, consequently, they are unable to handle the complexity of GC-MS data from human breath. We present a solution to GC-MS alignment using deep learning neural networks, which are more adept at complex, fuzzy data sets. We tested our model on several GC-MS data sets of various complexities and show the model has very good true position rates (up to 99% for easy data sets and up to 92% for very complex data sets). We compared our model with the popular correlation optimized warping (COW) and show our model has much better overall performance. This method can easily be adapted to other similar data such as those from liquid chromatography.
Information Transfer in Swarms with Leaders
Jun 30, 2014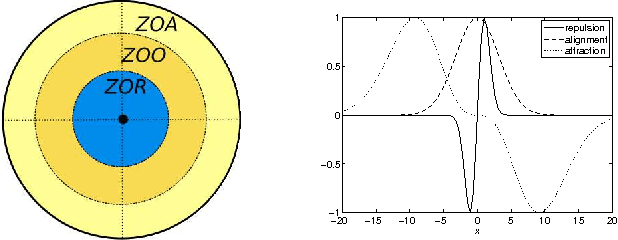
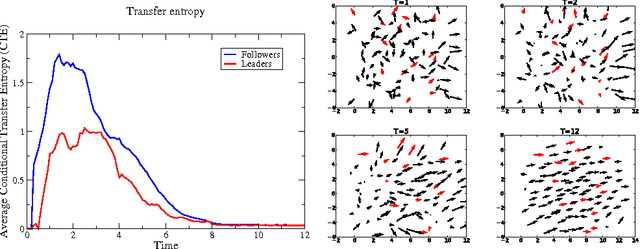
Swarm dynamics is the study of collections of agents that interact with one another without central control. In natural systems, insects, birds, fish and other large mammals function in larger units to increase the overall fitness of the individuals. Their behavior is coordinated through local interactions to enhance mate selection, predator detection, migratory route identification and so forth [Andersson and Wallander 2003; Buhl et al. 2006; Nagy et al. 2010; Partridge 1982; Sumpter et al. 2008]. In artificial systems, swarms of autonomous agents can augment human activities such as search and rescue, and environmental monitoring by covering large areas with multiple nodes [Alami et al. 2007; Caruso et al. 2008; Ogren et al. 2004; Paley et al. 2007; Sibley et al. 2002]. In this paper, we explore the interplay between swarm dynamics, covert leadership and theoretical information transfer. A leader is a member of the swarm that acts upon information in addition to what is provided by local interactions. Depending upon the leadership model, leaders can use their external information either all the time or in response to local conditions [Couzin et al. 2005; Sun et al. 2013]. A covert leader is a leader that is treated no differently than others in the swarm, so leaders and followers participate equally in whatever interaction model is used [Rossi et al. 2007]. In this study, we use theoretical information transfer as a means of analyzing swarm interactions to explore whether or not it is possible to distinguish between followers and leaders based on interactions within the swarm. We find that covert leaders can be distinguished from followers in a swarm because they receive less transfer entropy than followers.