 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation Transfer in Swarms with Leaders
Jun 30, 2014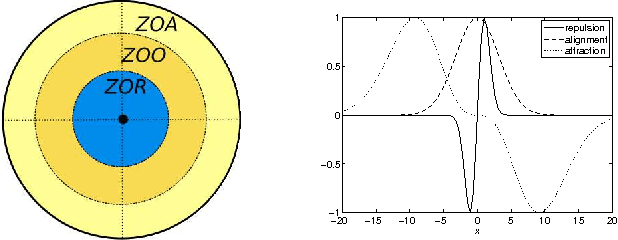
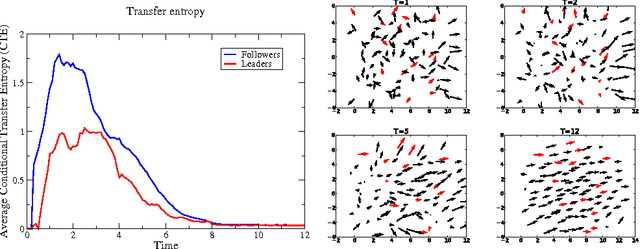
Swarm dynamics is the study of collections of agents that interact with one another without central control. In natural systems, insects, birds, fish and other large mammals function in larger units to increase the overall fitness of the individuals. Their behavior is coordinated through local interactions to enhance mate selection, predator detection, migratory route identification and so forth [Andersson and Wallander 2003; Buhl et al. 2006; Nagy et al. 2010; Partridge 1982; Sumpter et al. 2008]. In artificial systems, swarms of autonomous agents can augment human activities such as search and rescue, and environmental monitoring by covering large areas with multiple nodes [Alami et al. 2007; Caruso et al. 2008; Ogren et al. 2004; Paley et al. 2007; Sibley et al. 2002]. In this paper, we explore the interplay between swarm dynamics, covert leadership and theoretical information transfer. A leader is a member of the swarm that acts upon information in addition to what is provided by local interactions. Depending upon the leadership model, leaders can use their external information either all the time or in response to local conditions [Couzin et al. 2005; Sun et al. 2013]. A covert leader is a leader that is treated no differently than others in the swarm, so leaders and followers participate equally in whatever interaction model is used [Rossi et al. 2007]. In this study, we use theoretical information transfer as a means of analyzing swarm interactions to explore whether or not it is possible to distinguish between followers and leaders based on interactions within the swarm. We find that covert leaders can be distinguished from followers in a swarm because they receive less transfer entropy than followers.