 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFractional-order Modeling for Nonlinear Soft Actuators via Particle Swarm Optimization
Dec 20, 2025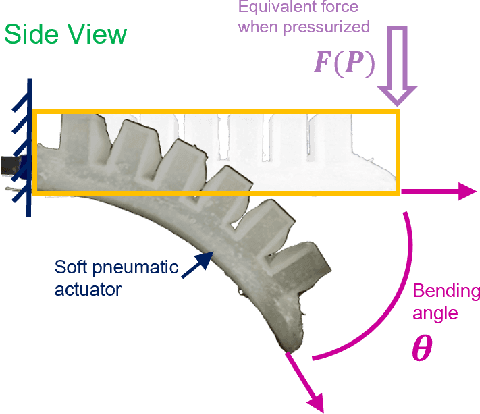
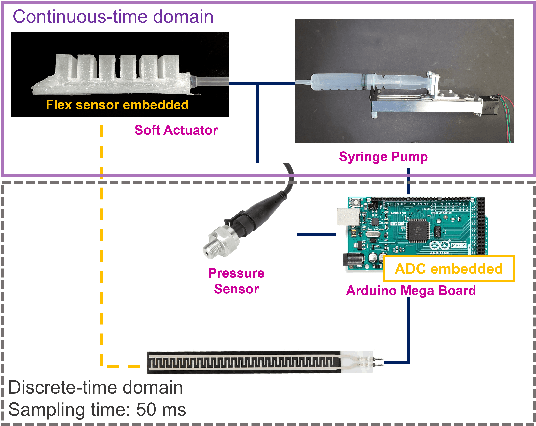
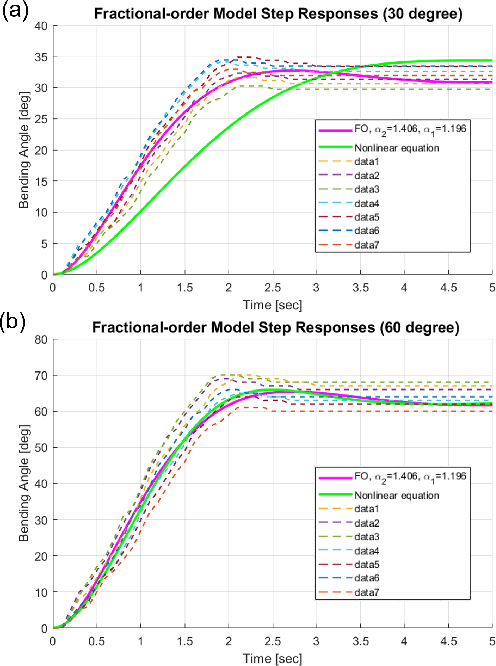
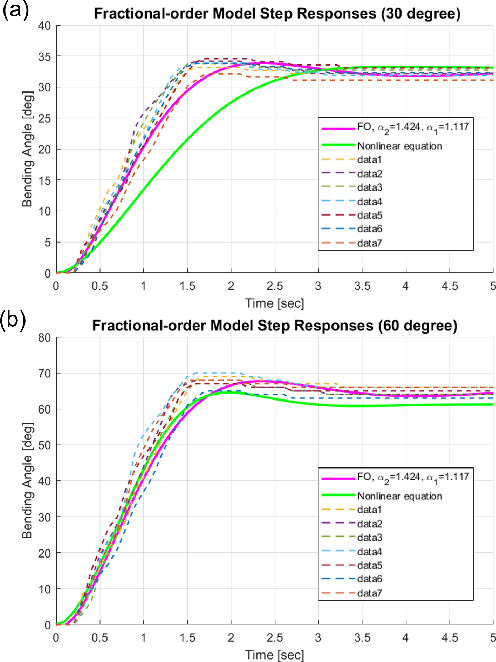
Modeling soft pneumatic actuators with high precision remains a fundamental challenge due to their highly nonlinear and compliant characteristics. This paper proposes an innovative modeling framework based on fractional-order differential equations (FODEs) to accurately capture the dynamic behavior of soft materials. The unknown parameters within the fractional-order model are identified using particle swarm optimization (PSO), enabling parameter estimation directly from experimental data without reliance on pre-established material databases or empirical constitutive laws. The proposed approach effectively represents the complex deformation phenomena inherent in soft actuators. Experimental results validate the accuracy and robustness of the developed model, demonstrating improvement in predictive performance compared to conventional modeling techniques. The presented framework provides a data-efficient and database-independent solution for soft actuator modeling, advancing the precision and adaptability of soft robotic system design.
Development of a Multi-Fingered Soft Gripper Digital Twin for Machine Learning-based Underactuated Control
Feb 21, 2025Soft robots, made from compliant materials, exhibit complex dynamics due to their flexibility and high degrees of freedom. Controlling soft robots presents significant challenges, particularly underactuation, where the number of inputs is fewer than the degrees of freedom. This research aims to develop a digital twin for multi-fingered soft grippers to advance the development of underactuation algorithms. The digital twin is designed to capture key effects observed in soft robots, such as nonlinearity, hysteresis, uncertainty, and time-varying phenomena, ensuring it closely replicates the behavior of a real-world soft gripper. Uncertainty is simulated using the Monte Carlo method. With the digital twin, a Q-learning algorithm is preliminarily applied to identify the optimal motion speed that minimizes uncertainty caused by the soft robots. Underactuated motions are successfully simulated within this environment. This digital twin paves the way for advanced machine learning algorithm training.
Underactuated Control of Multiple Soft Pneumatic Actuators via Stable Inversion
Jun 07, 2024
Soft grippers, with their inherent compliance and adaptability, show advantages for delicate and versatile manipulation tasks in robotics. This paper presents a novel approach to underactuated control of multiple soft actuators, specifically focusing on the synchronization of soft fingers within a soft gripper. Utilizing a single syringe pump as the actuation mechanism, we address the challenge of coordinating multiple degrees of freedom of a compliant system. The theoretical framework applies concepts from stable inversion theory, adapting them to the unique dynamics of the underactuated soft gripper. Through meticulous mechatronic system design and controller synthesis, we demonstrate both in simulation and experimentation the efficacy and applicability of our approach in achieving precise and synchronized manipulation tasks. Our findings not only contribute to the advancement of soft robot control but also offer practical insights into the design and control of underactuated systems for real-world applications.
Physics-data hybrid dynamic model of a multi-axis manipulator for sensorless dexterous manipulation and high-performance motion planning
May 07, 2024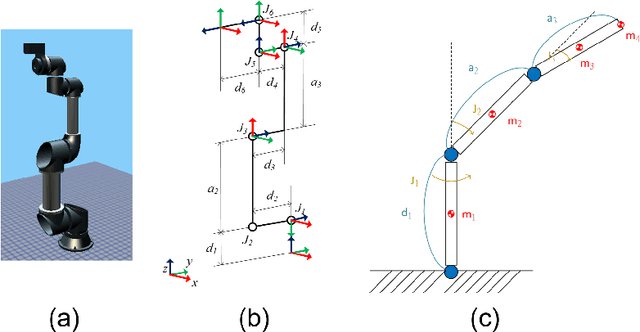
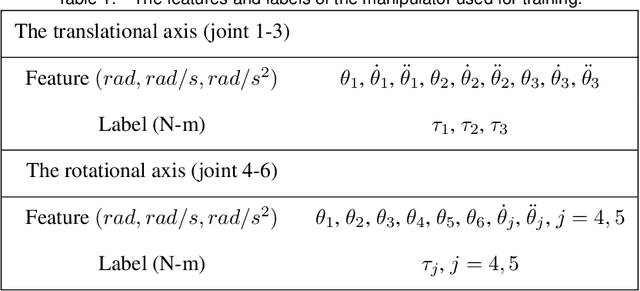
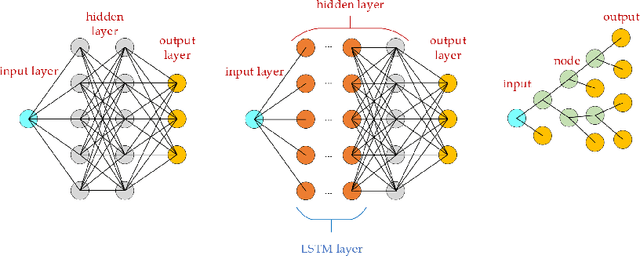
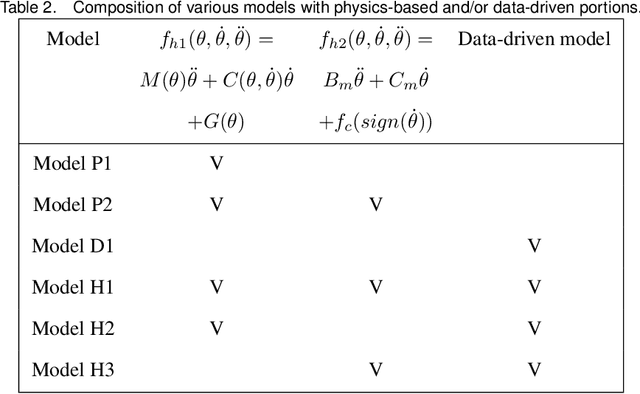
We report on the development of an implementable physics-data hybrid dynamic model for an articulated manipulator to plan and operate in various scenarios. Meanwhile, the physics-based and data-driven dynamic models are studied in this research to select the best model for planning. The physics-based model is constructed using the Lagrangian method, and the loss terms include inertia loss, viscous loss, and friction loss. As for the data-driven model, three methods are explored, including DNN, LSTM, and XGBoost. Our modeling results demonstrate that, after comprehensive hyperparameter optimization, the XGBoost architecture outperforms DNN and LSTM in accurately representing manipulator dynamics. The hybrid model with physics-based and data-driven terms has the best performance among all models based on the RMSE criteria, and it only needs about 24k of training data. In addition, we developed a virtual force sensor of a manipulator using the observed external torque derived from the dynamic model and designed a motion planner through the physics-data hybrid dynamic model. The external torque contributes to forces and torque on the end effector, facilitating interaction with the surroundings, while the internal torque governs manipulator motion dynamics and compensates for internal losses. By estimating external torque via the difference between measured joint torque and internal losses, we implement a sensorless control strategy which is demonstrated through a peg-in-hole task. Lastly, a learning-based motion planner based on the hybrid dynamic model assists in planning time-efficient trajectories for the manipulator. This comprehensive approach underscores the efficacy of integrating physics-based and data-driven models for advanced manipulator control and planning in industrial environments.
Nonlinear Parameter-Varying Modeling for Soft Pneumatic Actuators and Data-Driven Parameter Estimation
Nov 04, 2023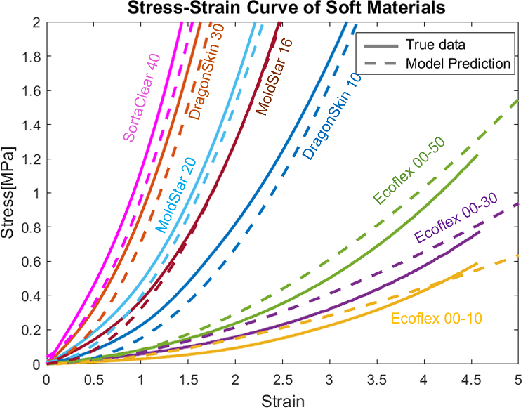
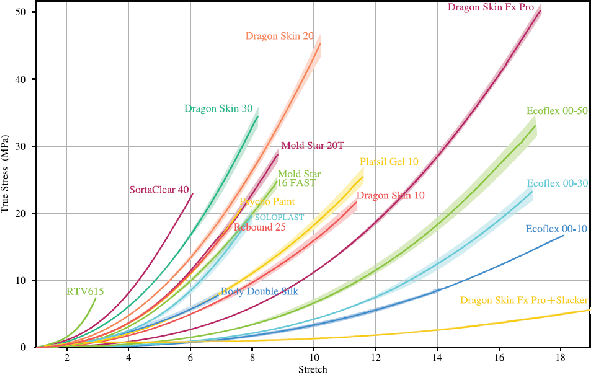
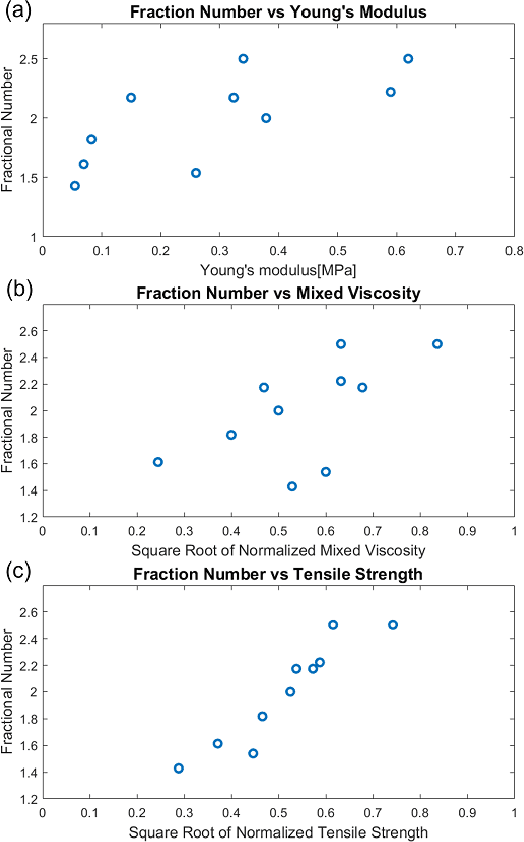
Accurately modeling soft robots remains a challenge due to their inherent nonlinear behavior and parameter variations. This paper presents a novel approach to modeling soft pneumatic actuators using a nonlinear parameter-varying framework. The research begins by introducing Ludwick's Law, providing a more accurate representation of the complex mechanical behavior exhibited by soft materials. Three key material properties, namely Young's modulus, tensile stress, and mixed viscosity, are utilized to estimate the parameter inside the nonlinear model using the least squares method. Subsequently, a nonlinear dynamic model for soft actuators is constructed by applying Ludwick's Law. To validate the accuracy and effectiveness of the proposed method, experimental validations are performed. We perform several experiments, demonstrating the model's capabilities in predicting the dynamical behavior of soft pneumatic actuators. In conclusion, this work contributes to the advancement of soft pneumatic actuator modeling that represents their nonlinear behavior.
Approximated Modeling and Optimal Design for a Soft Pneumatic Actuator Considering the Force/Torque and System Controllability
Oct 19, 2023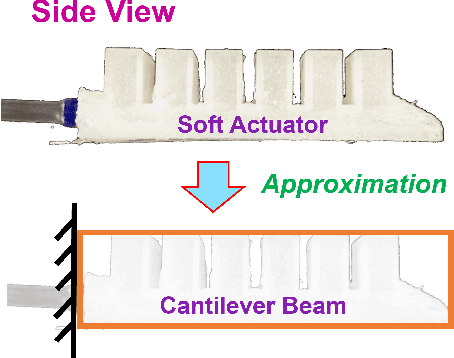



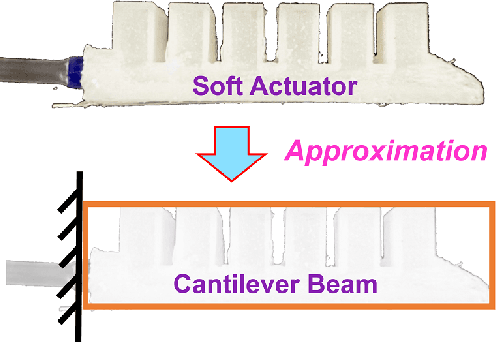
Soft pneumatic actuators (SPAs) are widely employed to drive soft robots. However, their inherent flexibility offers both benefits and challenges. This property reduces their output force/torque and makes them hard to control. This paper introduces a new design method that enhances the actuator's performance and controllability. The complex structure of the soft actuator is simplified by approximating it as a cantilever beam. This allows us to derive a mechanical equation between input pressure to output torque. Additionally, a dynamical model is explored to understand the correlation between the natural frequency and dimensional parameters of the SPA. The design problem is then transformed into an optimization problem, using the mechanical equation as the objective function and the dynamical equation as a constraint. By solving this optimization problem, the optimal dimensional parameters are determined. Prior to fabrication, preliminary tests are conducted using the finite element method. Six prototypes are manufactured to validate the proposed approach. The optimal actuator successfully generates the desired force/torque, while its natural frequency remains within the constrained range. This work highlights the potential of using approximated models and optimization formulation to boost the efficiency and dynamic performance of soft pneumatic actuators.
Control of Soft Pneumatic Actuators with Approximated Dynamical Modeling
Oct 03, 2023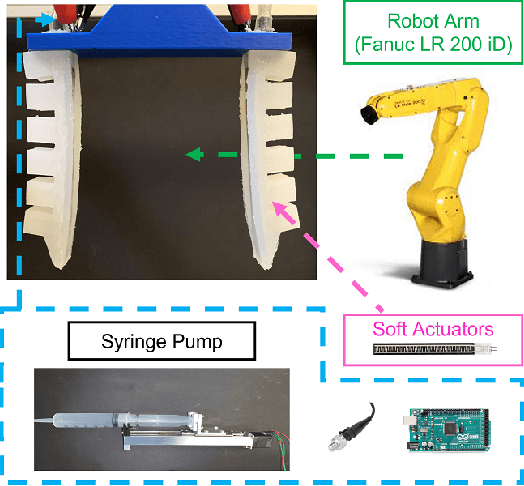
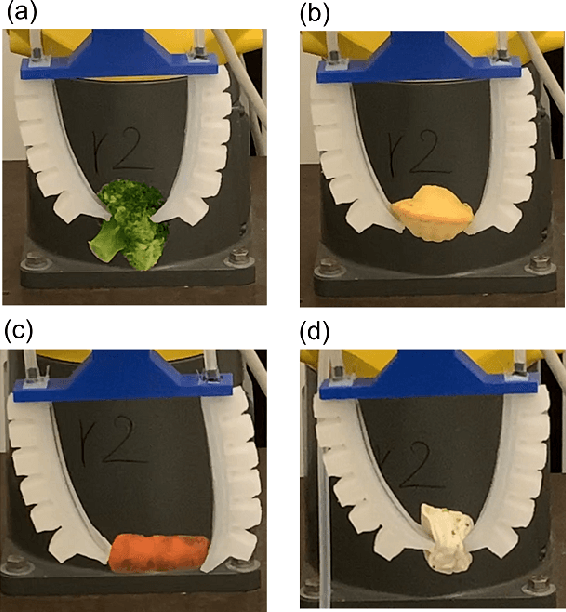
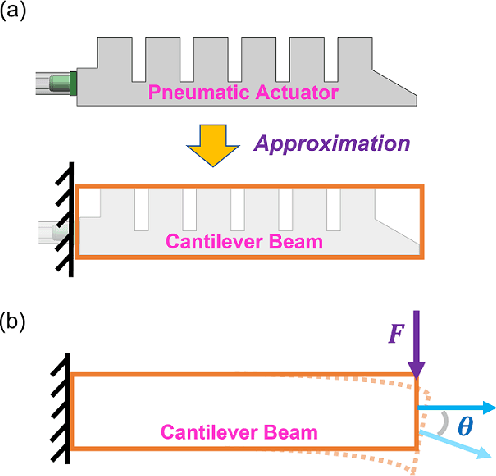
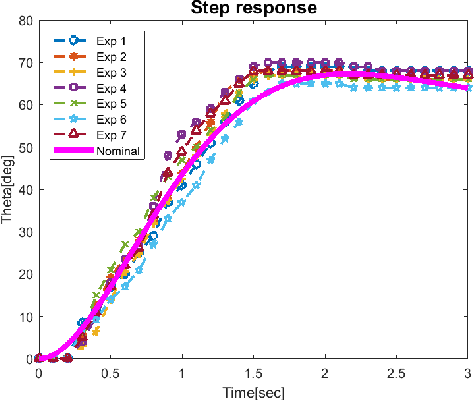
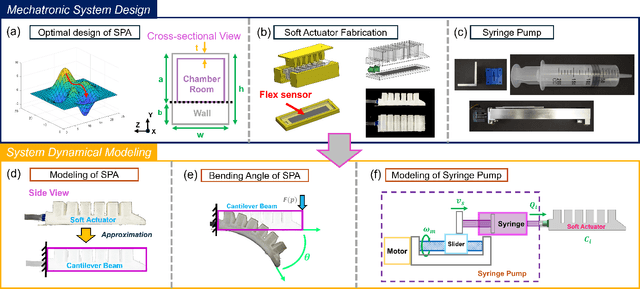
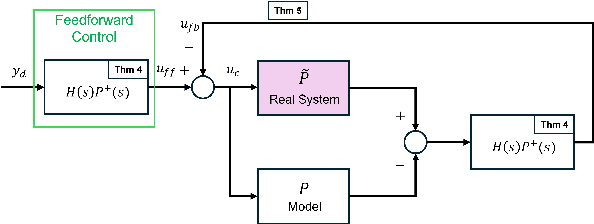
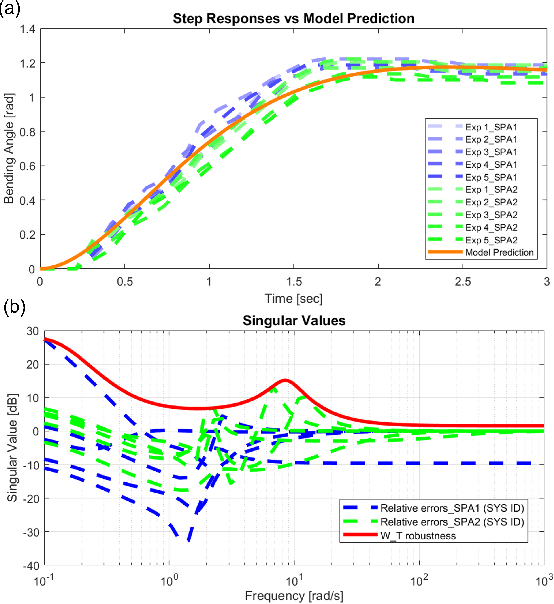
This paper introduces a full system modeling strategy for a syringe pump and soft pneumatic actuators(SPAs). The soft actuator is conceptualized as a beam structure, utilizing a second-order bending model. The equation of natural frequency is derived from Euler's bending theory, while the damping ratio is estimated by fitting step responses of soft pneumatic actuators. Evaluation of model uncertainty underscores the robustness of our modeling methodology. To validate our approach, we deploy it across four prototypes varying in dimensional parameters. Furthermore, a syringe pump is designed to drive the actuator, and a pressure model is proposed to construct a full system model. By employing this full system model, the Linear-Quadratic Regulator (LQR) controller is implemented to control the soft actuator, achieving high-speed responses and high accuracy in both step response and square wave function response tests. Both the modeling method and the LQR controller are thoroughly evaluated through experiments. Lastly, a gripper, consisting of two actuators with a feedback controller, demonstrates stable grasping of delicate objects with a significantly higher success rate.
Development of Soft Tactile Sensor for Force Measurement and Position Detection
May 15, 2021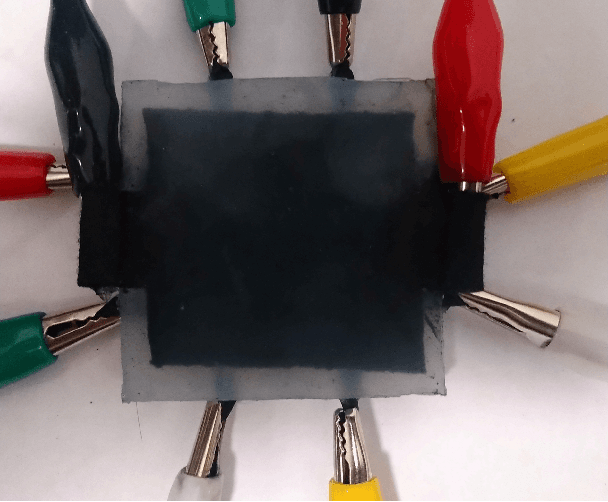
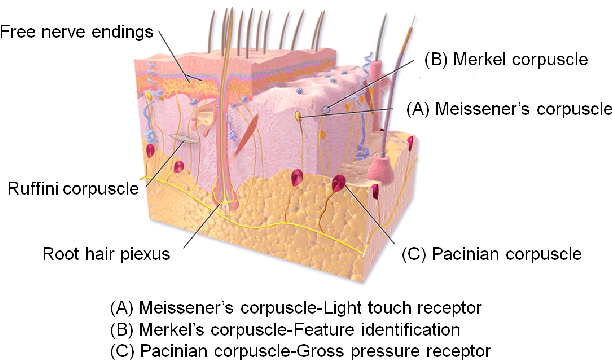
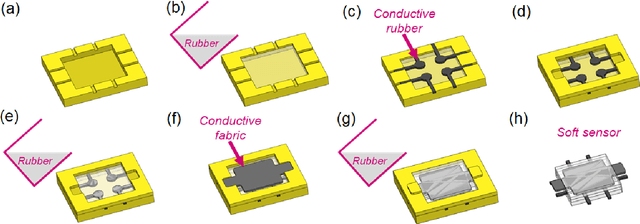
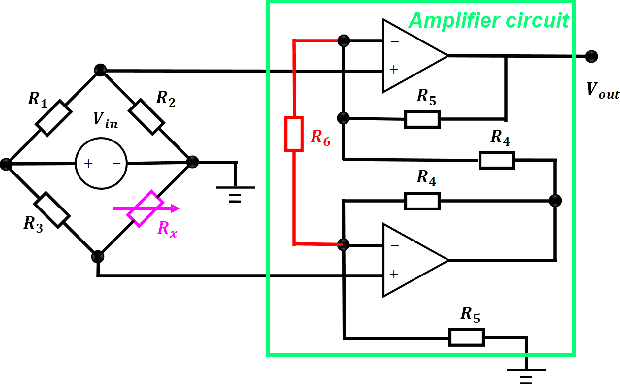
As more robots are implemented for contact-rich tasks, tactile sensors are in increasing demand. For many circumstances, the contact is required to be compliant, and soft sensors are in need. This paper introduces a novelly designed soft sensor that can simultaneously estimate the contact force and contact location. Inspired by humans' skin, which contains multi-layers of receptors, the designed tactile sensor has a dual-layer structure. The first layer is made of a conductive fabric that is responsible for sensing the contact force. The second layer is composed of four small conductive rubbers that can detect the contact location. Signals from the two layers are firstly processed by Wheatstone bridges and amplifier circuits so that the measurement noises are eliminated, and the sensitivity is improved. An Arduino chip is used for processing the signal and analyzing the data. The contact force can be obtained by a pre-trained model that maps from the voltage to force, and the contact location is estimated by the voltage signal from the conductive rubbers in the second layer. In addition, filtering methods are applied to eliminate the estimation noise. Finally, experiments are provided to show the accuracy and robustness of the sensor.