 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Parameter-Varying Modeling for Soft Pneumatic Actuators and Data-Driven Parameter Estimation
Paper and Code
Nov 04, 2023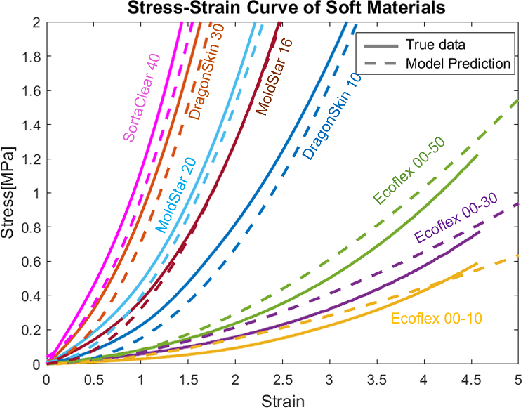
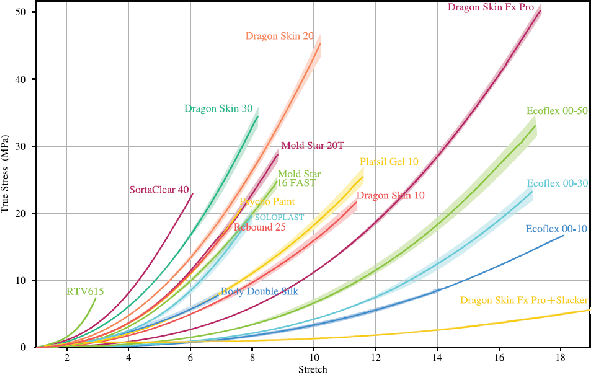
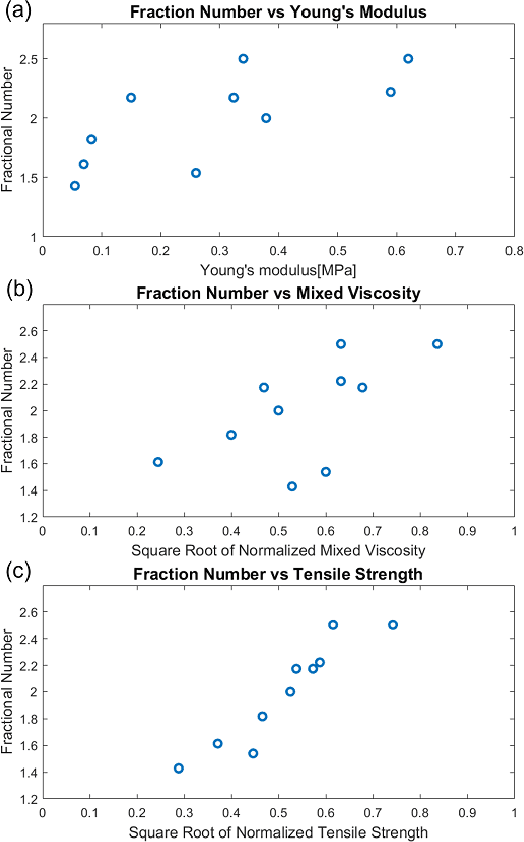
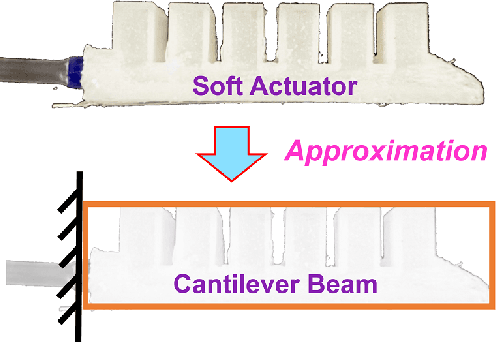
Accurately modeling soft robots remains a challenge due to their inherent nonlinear behavior and parameter variations. This paper presents a novel approach to modeling soft pneumatic actuators using a nonlinear parameter-varying framework. The research begins by introducing Ludwick's Law, providing a more accurate representation of the complex mechanical behavior exhibited by soft materials. Three key material properties, namely Young's modulus, tensile stress, and mixed viscosity, are utilized to estimate the parameter inside the nonlinear model using the least squares method. Subsequently, a nonlinear dynamic model for soft actuators is constructed by applying Ludwick's Law. To validate the accuracy and effectiveness of the proposed method, experimental validations are performed. We perform several experiments, demonstrating the model's capabilities in predicting the dynamical behavior of soft pneumatic actuators. In conclusion, this work contributes to the advancement of soft pneumatic actuator modeling that represents their nonlinear behavior.